 La mission extrême ultraviolet explorer : Bilan et premiers résultats
La mission extrême ultraviolet explorer : Bilan et premiers résultats Performances des télescopes d’imagerie Extreme Ultraviolet Explorer
Performances des télescopes d’imagerie Extreme Ultraviolet Explorer Repos en morceaux, EUVE
Repos en morceaux, EUVE Lancement réussi de l’Extreme Ultraviolet Explorer de la NASA et détection de la première lumière
Lancement réussi de l’Extreme Ultraviolet Explorer de la NASA et détection de la première lumière Lancement de l’Extreme Ultraviolet Explorer (EUVE) de la NASA
Lancement de l’Extreme Ultraviolet Explorer (EUVE) de la NASA 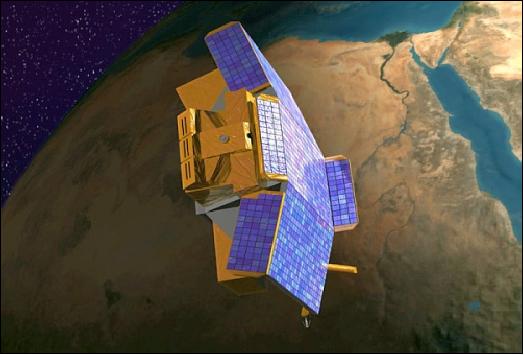 La mission extrême ultraviolet explorer : Bilan et premiers résultats
La mission extrême ultraviolet explorer : Bilan et premiers résultats La mission Extreme Ultraviolet Explorer
La mission Extreme Ultraviolet Explorer
(7 juin 1992 – 31 janvier 2001)
L’Extreme Ultraviolet Explorer (EUVE) était une mission d’astronomie financée par la NASA opérant dans la bande passante relativement inexplorée de l’ultraviolet extrême (70-760 Angströms de longueur d’onde, équivalent à 0,016-0,163 keV d’énergie). La charge utile scientifique, qui a été conçue et construite au Laboratoire des sciences spatiales de l’Université de Californie à Berkeley, sous la direction du Dr Roger F. Malina, se composait de trois télescopes à balayage à incidence rasante et d’un spectromètre ultraviolet extrême (EUV). / instrument d’enquête en profondeur. La charge utile scientifique était attachée à un vaisseau spatial modulaire multi-missions.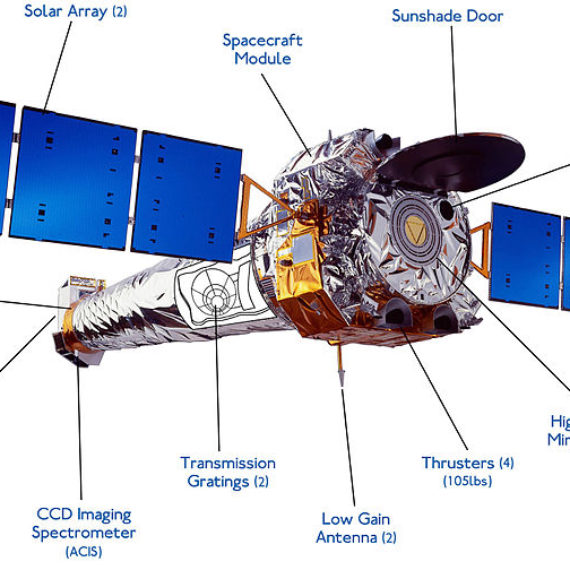 La mission EUVE a été lancée le 7 juin 1992 sur une fusée Delta II depuis Cap Canaveral. Les six premiers mois de la mission ont été consacrés à la cartographie du ciel EUV avec les télescopes à balayage. Par la suite, la mission a effectué sa phase d’observateur invité. Les objectifs scientifiques d’EUVE étaient de (i) effectuer une étude tout ciel, toutes bandes dans l’ultraviolet extrême (70-760 A) dans quatre bandes passantes, avec une résolution angulaire de 6 x 6 minutes d’arc et une moyenne d’environ 500 secondes exposition, (ii) effectuer une étude approfondie dans l’EUV dans deux bandes passantes le long de l’écliptique, (iii) effectuer des observations par spectroscopie pointue des cibles identifiées par les observateurs invités, (iv) identifier la physique d’émission des sources EUV telles que les naines blanches chaudes et les étoiles coronales de type tardif, (v) étudier le milieu interstellaire,
La mission EUVE a été lancée le 7 juin 1992 sur une fusée Delta II depuis Cap Canaveral. Les six premiers mois de la mission ont été consacrés à la cartographie du ciel EUV avec les télescopes à balayage. Par la suite, la mission a effectué sa phase d’observateur invité. Les objectifs scientifiques d’EUVE étaient de (i) effectuer une étude tout ciel, toutes bandes dans l’ultraviolet extrême (70-760 A) dans quatre bandes passantes, avec une résolution angulaire de 6 x 6 minutes d’arc et une moyenne d’environ 500 secondes exposition, (ii) effectuer une étude approfondie dans l’EUV dans deux bandes passantes le long de l’écliptique, (iii) effectuer des observations par spectroscopie pointue des cibles identifiées par les observateurs invités, (iv) identifier la physique d’émission des sources EUV telles que les naines blanches chaudes et les étoiles coronales de type tardif, (v) étudier le milieu interstellaire, 
À la fin de 1997, la NASA a décidé que les responsabilités d’archivage des données finales EUVE devraient être transférées du Center for Extreme-Ultraviolet Astrophysics (CEA) au HEASARC, au Space Telescope Science Institute (STScI) et au National Space Sciences Data Center (NSSDC). . Le rôle du HEASARC est de servir les données EUVE accessibles au public et d’agir comme une interface avec la communauté des astrophysiciens des hautes énergies (rayons X et gamma), tandis que celui du STScI est de fournir un accès similaire aux données optiques et la communauté UV, ainsi que pour maintenir le progiciel basé sur EUVE IRAF. Le rôle du NSSDC est d’archiver en profondeur les données EUVE et de répondre aux demandes de grandes quantités de données EUVE, c’est-à-dire de volumes de données impossibles à récupérer sur Internet/WWW.
À l’été 2000, la NASA a décidé que les opérations de la mission EUVE devaient cesser d’ici quelques mois. Les opérations scientifiques d’EUVE ont pris fin le 26 janvier 2001, et il s’en est suivi plusieurs jours de tests d’ingénierie de fin de vie des alimentations haute tension de secours jamais utilisées et de vérification de la capacité restante de la batterie. EUVE a été stabilisé pointant loin du Soleil et envoyé en lieu sûr à 23h59 UTC le 31 janvier 2001. Les émetteurs ont finalement été commandés le 2 février 2001. EUVE a été laissé sur une orbite de 424 x 433 km x 28,4 degrés qui s’est lentement décomposée jusqu’à il est finalement rentré dans l’atmosphère terrestre et a été détruit le 30 janvier 2002, presque exactement un an après la fin des opérations scientifiques. Le 27 mars 2001, les sites ftp et Web du CEA ont été fermés, bien que de nombreuses pages Web du CEA aient été déplacées soit vers le site Web principal du laboratoire des sciences spatiales de l’UC Berkeley , soit vers les archives multi-missions du télescope spatial (MAST) .
Le 27 mars 2001, les sites ftp et Web du CEA ont été fermés, bien que de nombreuses pages Web du CEA aient été déplacées soit vers le site Web principal du laboratoire des sciences spatiales de l’UC Berkeley , soit vers les archives multi-missions du télescope spatial (MAST) .
Performances des télescopes d’imagerie Extreme Ultraviolet Explorer 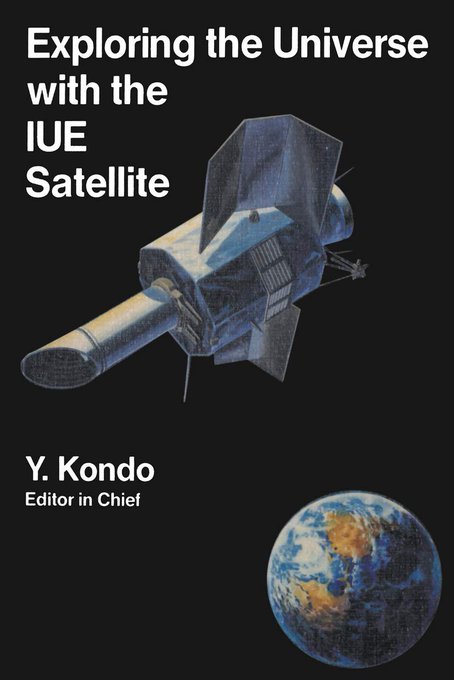
 (1). INTRODUCTION
(1). INTRODUCTION
Le satellite Extreme Ultraviolet Explorer ( EUVE ) est une mission de classe Explorer de la NASA consacrée à l’acquisition de données astronomiques dans la gamme de longueurs d’onde de 60 à 750 Å. La NASA a lancé l’ observatoire EUVE le 7 juin 1992 à partir d’une fusée Delta II sur une orbite circulaire avec une inclinaison de 28° et une altitude de 528 km.
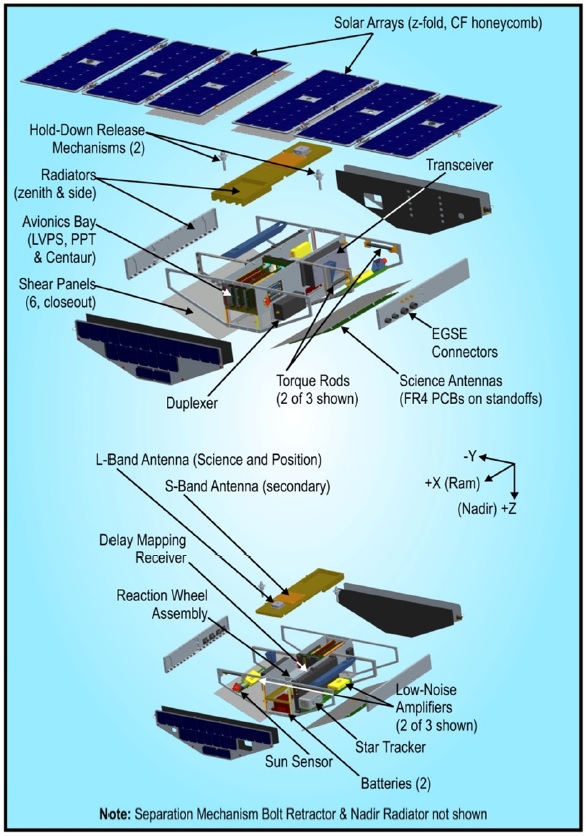
Le satellite se compose d’un vaisseau spatial multimission et d’un module de charge utile contenant les quatre instruments scientifiques fournis par l’Université de Californie à Berkeley. Chacun des instruments contient un miroir à incidence rasante de 40 cm de diamètre et un détecteur d’imagerie à plaque à microcanaux. Trois des instruments sont des télescopes à balayage utilisés pour effectuer un levé EUV de tout le ciel dans quatre bandes photométriques ; ces trois télescopes sont co-alignés. Le quatrième instrument, le Deep Survey/Spectrometer (DS/S), a effectué un relevé EUV profond le long de l’écliptique suivi d’observations spectroscopiques pointues qui se poursuivent à ce jour. Le DS/S est monté orthogonalement aux trois instruments du scanner. L’instrumentation scientifique est discutée en détail dans Bowyer & Malina (1991) et Welsh et al. (1990).
L’ EUVEmission se déroule en trois phases. La phase de dégazage et de vérification en orbite a duré du 7 juin 1992 au 21 juillet et a permis la mise en service et l’étalonnage des instruments sur un ensemble initial de cibles d’étalonnage en orbite. La deuxième phase a été consacrée à l’enquête tout-ciel et a duré 6 mois du 21 juillet 1992 au 23 janvier 1993. Au cours de cette phase, l’observatoire tournait à 3 révolutions par orbite avec une phase de rotation définie de sorte que pendant chaque nuit orbitale les scanners arpentaient un tout le grand cercle dans le ciel. En mode relevé, l’axe de rotation de l’engin spatial s’est verrouillé sur le Soleil de sorte que les scanners pointaient à 90° du Soleil à tout moment, et le DS/S, qui est aligné avec l’axe de rotation de l’engin spatial, pointait dans la direction antisolaire.  Pendant six mois, l’axe de rotation a été déplacé d’un degré par jour, permettant aux scanners d’étudier tout le ciel, tandis que l’instrument DS/S balayait un arc de ciel de 2° de large et 180° de long, le long de l’écliptique. Les relevés du scanner tout ciel observent quatre bandes EUV distinctes centrées sur
Pendant six mois, l’axe de rotation a été déplacé d’un degré par jour, permettant aux scanners d’étudier tout le ciel, tandis que l’instrument DS/S balayait un arc de ciel de 2° de large et 180° de long, le long de l’écliptique. Les relevés du scanner tout ciel observent quatre bandes EUV distinctes centrées sur![]() 100, 200, 400 et 600 Å. Le relevé écliptique profond simultané,
100, 200, 400 et 600 Å. Le relevé écliptique profond simultané, ![]() 10 fois plus sensible que le relevé scanner, est centré sur deux bandes EUV à
10 fois plus sensible que le relevé scanner, est centré sur deux bandes EUV à ![]() 100 et 200 Å. La phase finale de la mission est la phase de spectroscopie de l’observateur invité, qui a débuté le 23 janvier 1993, et le programme à angle droit (RAP, McDonald et al. 1994 ) d’observations photométriques profondes effectuées avec les instruments du scanner et menées en même temps que le pointages spectroscopiques. On s’attend à ce que l’ observatoire EUVE rentre dans l’atmosphère terrestre vers 2002. Une compilation des résultats récents d’ EUVE peut être trouvée dans Bowyer & Malina (1996) .
100 et 200 Å. La phase finale de la mission est la phase de spectroscopie de l’observateur invité, qui a débuté le 23 janvier 1993, et le programme à angle droit (RAP, McDonald et al. 1994 ) d’observations photométriques profondes effectuées avec les instruments du scanner et menées en même temps que le pointages spectroscopiques. On s’attend à ce que l’ observatoire EUVE rentre dans l’atmosphère terrestre vers 2002. Une compilation des résultats récents d’ EUVE peut être trouvée dans Bowyer & Malina (1996) .
D’autres documents ont rapporté les résultats des tests au sol et de l’étalonnage des composants individuels d’ EUVE . Dans ce travail, nous résumons tout ce qui est connu des étalonnages au sol et en vol sur les quatre télescopes imageurs de l’ observatoire EUVE
(2). Description du scanner et des instruments de DEEP SURVEY
Les deux instruments à longueur d’onde la plus courte, les scanners A et B, utilisent des miroirs Wolter-Schwarzschild de type I identiques avec des angles de rasage faibles de ![]() 5° sur les surfaces primaire et secondaire. Les optiques sont recouvertes d’une fine couche d’or pour améliorer la réflectivité EUV. Le miroir du scanner C est une conception Wolter-Schwarzschild de type II ( Finley et al. 1986b ; Finley et al. 1988) et recouvert de nickel. La conception du miroir du scanner C, grâce à l’utilisation d’angles de rasage élevés et du revêtement de nickel, a été optimisée pour supprimer la transmission du rayonnement à moins de 100 Å tout en maintenant une réflectivité élevée dans les bandes passantes du filtre à 300 Å. L’instrument DS/S utilise un miroir Wolter-Schwarzschild de type II recouvert d’or et est utilisé pour alimenter à la fois le détecteur d’étude en profondeur et trois spectromètres séparés (réseaux et détecteurs). La lumière du miroir DS/S est divisée en six segments approximativement égaux, dont trois sont utilisés pour le canal de surveillance profond de l’instrument, les trois autres étant répartis entre les trois canaux du spectromètre. Les détails de la conception du spectromètre sont donnés ailleurs ( Abbott et al. 1996 ; Martin et al. 1985; Hettrick et al. 1985 ). Les différents rapports focaux et conceptions de miroirs utilisés dans les trois télescopes se traduisent par des échelles d’image, des résolutions, des champs de vision et des bandes passantes différents et sont résumés dans le tableau. Les caractéristiques d’ imagerie des télescopes sont discutées en détail
5° sur les surfaces primaire et secondaire. Les optiques sont recouvertes d’une fine couche d’or pour améliorer la réflectivité EUV. Le miroir du scanner C est une conception Wolter-Schwarzschild de type II ( Finley et al. 1986b ; Finley et al. 1988) et recouvert de nickel. La conception du miroir du scanner C, grâce à l’utilisation d’angles de rasage élevés et du revêtement de nickel, a été optimisée pour supprimer la transmission du rayonnement à moins de 100 Å tout en maintenant une réflectivité élevée dans les bandes passantes du filtre à 300 Å. L’instrument DS/S utilise un miroir Wolter-Schwarzschild de type II recouvert d’or et est utilisé pour alimenter à la fois le détecteur d’étude en profondeur et trois spectromètres séparés (réseaux et détecteurs). La lumière du miroir DS/S est divisée en six segments approximativement égaux, dont trois sont utilisés pour le canal de surveillance profond de l’instrument, les trois autres étant répartis entre les trois canaux du spectromètre. Les détails de la conception du spectromètre sont donnés ailleurs ( Abbott et al. 1996 ; Martin et al. 1985; Hettrick et al. 1985 ). Les différents rapports focaux et conceptions de miroirs utilisés dans les trois télescopes se traduisent par des échelles d’image, des résolutions, des champs de vision et des bandes passantes différents et sont résumés dans le tableau. Les caractéristiques d’ imagerie des télescopes sont discutées en détail 2.2. Détecteurs
2.2. Détecteurs
Les détecteurs à plaques à microcanaux sont situés au foyer des miroirs du télescope ( Siegmund et al. 1984 ). Chaque détecteur a une zone active de 52 mm de diamètre et est construit à partir d’un empilement ![]() en Z
en Z ![]() de trois plaques de microcanaux avec
de trois plaques de microcanaux avec ![]() des pores de 12,5 m de diamètre sur
des pores de 12,5 m de diamètre sur ![]() des centres de 15 m. Les surfaces des détecteurs en verre et en nichrome des scanners A et B et du sondage en profondeur sont recouvertes de MgF 2 pour créer des photocathodes avec une sensibilité accrue dans l’EUV. Le scanner C n’utilise pas de revêtement de photocathode MgF 2 car la raie géocoronaire de 584 Å He est si brillante dans la bande passante Sn/SiO que le flux de télémétrie saturerait avec l’efficacité quantique (QE) plus élevée d’une photocathode améliorée .
des centres de 15 m. Les surfaces des détecteurs en verre et en nichrome des scanners A et B et du sondage en profondeur sont recouvertes de MgF 2 pour créer des photocathodes avec une sensibilité accrue dans l’EUV. Le scanner C n’utilise pas de revêtement de photocathode MgF 2 car la raie géocoronaire de 584 Å He est si brillante dans la bande passante Sn/SiO que le flux de télémétrie saturerait avec l’efficacité quantique (QE) plus élevée d’une photocathode améliorée .
Chaque photoélectron produit une cascade d’électrons dans la plaque à microcanaux résultant en une impulsion de charge ![]() de 10 7 e – . Une anode de lecture en coin et en bande ( Siegmund et al. 1986 ) collecte le nuage de charge, et son emplacement centroïde, déterminé par l’électronique embarquée, correspond au site d’interaction initial sur la photocathode. Le seuillage intégré empêche les événements de fond de hauteur d’impulsion haute et basse d’entrer dans le flux de télémétrie. Chaque emplacement de photon est transmis au sol avec une précision ( X , Y ) de 2048 × 2048. La résolution spatiale des détecteurs est d’environ 160
de 10 7 e – . Une anode de lecture en coin et en bande ( Siegmund et al. 1986 ) collecte le nuage de charge, et son emplacement centroïde, déterminé par l’électronique embarquée, correspond au site d’interaction initial sur la photocathode. Le seuillage intégré empêche les événements de fond de hauteur d’impulsion haute et basse d’entrer dans le flux de télémétrie. Chaque emplacement de photon est transmis au sol avec une précision ( X , Y ) de 2048 × 2048. La résolution spatiale des détecteurs est d’environ 160![]() m (5,3 pixels) FWHM et est modélisé comme une convolution de la PSF optique théorique avec une gaussienne.
m (5,3 pixels) FWHM et est modélisé comme une convolution de la PSF optique théorique avec une gaussienne.2.3. Filtres
Un cadre de filtre avec quatre sections de filtre pour les scanners et trois pour le relevé en profondeur est monté sur la face de chaque détecteur, comme illustré. Les filtres sont des couches minces de 150 ![]() à 300 nm d’épaisseur et sont extrêmement délicats. Chaque instrument est fourni avec deux types de filtres ; Le tableau 2 résume leurs constituants et les bandes passantes à 10 % (lorsqu’ils sont combinés avec les réflectivités du miroir et les QE du détecteur). Les détails concernant la construction et l’étalonnage des filtres EUVE sont donnés dans Vallerga et al. (1986) et Vallerga, Vedder et Siegmund (1992) et Vedder et al.
à 300 nm d’épaisseur et sont extrêmement délicats. Chaque instrument est fourni avec deux types de filtres ; Le tableau 2 résume leurs constituants et les bandes passantes à 10 % (lorsqu’ils sont combinés avec les réflectivités du miroir et les QE du détecteur). Les détails concernant la construction et l’étalonnage des filtres EUVE sont donnés dans Vallerga et al. (1986) et Vallerga, Vedder et Siegmund (1992) et Vedder et al.
(3). ÉTALONNAGES
Les instruments ont été testés au sol dans le vide à l’installation d’étalonnage de l’Université de Californie au Laboratoire des sciences spatiales de Berkeley ( Welsh, Jelinsky et Malina 1988). Les miroirs étaient éclairés soit par un collimateur, qui fournissait des faisceaux de lumière EUV monochromatique qui remplissaient complètement l’ouverture d’entrée de chaque télescope, soit par des faisceaux de crayon qui étaient incidents sur seulement une petite fraction de la surface de chaque miroir. Des sources de ligne d’émission avec des longueurs d’onde allant de 44 à 2500 Å ont été utilisées pour tester les réponses des instruments dans la bande et hors bande. Des étalonnages photométriques absolus ont été réalisés en mesurant l’intensité du faisceau EUV avec des diodes standard du National Institute of Standards and Technology (NIST). Cependant, les caractéristiques spectrales nettes de la réponse de l’instrument qui se situent entre les raies d’émission discrètes ne peuvent pas être mesurées à l’installation de Berkeley. Ainsi, Jelinsky et al. 1988 ). Immédiatement après le lancement d’ EUVE , six semaines ont été consacrées aux tests et étalonnages en orbite. Des observations d’étalonnage supplémentaires ont été effectuées au besoin pendant les phases d’étude de tout le ciel et de mission d’observation invitée. Quarante sources ponctuelles EUV avec des propriétés spectrales différentes ont été observées à la fois sur et hors axe dans chaque filtre pour déterminer la réponse et les propriétés d’imagerie. Les étoiles
Immédiatement après le lancement d’ EUVE , six semaines ont été consacrées aux tests et étalonnages en orbite. Des observations d’étalonnage supplémentaires ont été effectuées au besoin pendant les phases d’étude de tout le ciel et de mission d’observation invitée. Quarante sources ponctuelles EUV avec des propriétés spectrales différentes ont été observées à la fois sur et hors axe dans chaque filtre pour déterminer la réponse et les propriétés d’imagerie. Les étoiles ![]() Vel et
Vel et ![]() Sco (type spectral B2 IV) ont été observées pour mesurer la réponse UV lointaine hors bande, et les sources de rayons X Sco X1 et Her X1 ont été observées pour la réponse aux rayons X. Collectivement, les données au sol et en vol ont été analysées pour déterminer les capacités d’imagerie et photométriques des instruments d’imagerie EUVE .
Sco (type spectral B2 IV) ont été observées pour mesurer la réponse UV lointaine hors bande, et les sources de rayons X Sco X1 et Her X1 ont été observées pour la réponse aux rayons X. Collectivement, les données au sol et en vol ont été analysées pour déterminer les capacités d’imagerie et photométriques des instruments d’imagerie EUVE .
(4). CARACTÉRISTIQUES D’IMAGERIE4.1. Fonctions d’étalement de points
La fonction d’étalement des points (PSF) pour chaque instrument est une fonction de l’angle hors axe, de l’angle d’azimut, de la longueur d’onde, de la résolution du détecteur et du bruit à motif fixe du détecteur. La qualité d’image des miroirs du télescope, en fonction de l’emplacement dans le champ de vision, varie fortement avec l’angle hors axe en raison de la surface focale très incurvée, ainsi que des aberrations optiques inhérentes à la conception en incidence rasante. Les détecteurs plans ont été montés à dessein pour défocaliser l’imagerie sur l’axe, ce qui améliore la qualité de l’image plus loin dans le champ de vision. Cette défocalisation augmente la sensibilité résultante de l’étude du ciel en maximisant le nombre d’éléments de résolution d’imagerie dans le champ de vision. Dans la figure nous présentons 51 pointages dans le scanner B de la naine blanche brillante HZ 43 à divers angles hors axe et azimutaux illustrant la nature variable de la PSF. Une image de l’amas d’étoiles Hyades, illustrée à la figure , illustre également la PSF variable de l’instrument de sondage en profondeur. Étant donné que le détecteur de sondage profond voit trois segments d’ouverture d’entrée équidistants, la PSF de sondage profond apparaît distinctement trilobée à l’intérieur et à l’extérieur de la meilleure mise au point. ![]() halo
halo ![]() entourant le noyau à un rayon de
entourant le noyau à un rayon de ![]() 45
45 ![]() 60 pixels. Le rapport des événements photons aux événements halo dépend fortement de la longueur d’onde et, dans une moindre mesure, des constituants du filtre. Aux longueurs d’onde plus longues, ces électrons de filtre contribuent à une fraction significative du signal source total et modifient la forme de la PSF. Les images obtenues au sol avec les trois scanners utilisant un rayonnement crayon monochromatique à 26 longueurs d’onde différentes ont été analysées pour quantifier les halos du filtre. La figure trace le nombre fractionnaire d’événements de halo par rapport au signal total. En dessous de 135 Å, les événements de halo constituent moins de 2 % du signal total, tandis qu’au-delà de 400 Å, la fraction de halo passe de 20 % à 50 %. Toutes les mesures de surface effective indiquées ci-dessous ( § 5) incluent la réponse supplémentaire causée par les halos du filtre. Une discussion sur la production de photoélectrons de filtre peut être trouvée dans Vallerga et al. (1992) .
60 pixels. Le rapport des événements photons aux événements halo dépend fortement de la longueur d’onde et, dans une moindre mesure, des constituants du filtre. Aux longueurs d’onde plus longues, ces électrons de filtre contribuent à une fraction significative du signal source total et modifient la forme de la PSF. Les images obtenues au sol avec les trois scanners utilisant un rayonnement crayon monochromatique à 26 longueurs d’onde différentes ont été analysées pour quantifier les halos du filtre. La figure trace le nombre fractionnaire d’événements de halo par rapport au signal total. En dessous de 135 Å, les événements de halo constituent moins de 2 % du signal total, tandis qu’au-delà de 400 Å, la fraction de halo passe de 20 % à 50 %. Toutes les mesures de surface effective indiquées ci-dessous ( § 5) incluent la réponse supplémentaire causée par les halos du filtre. Une discussion sur la production de photoélectrons de filtre peut être trouvée dans Vallerga et al. (1992) . 
![]() (225 pixels) du
(225 pixels) du ![]() centroïde de l’image 2 FWHM sur les scanners A et B. Une estimation de premier ordre de la quantité de diffusion a été déterminée en définissant une région d’image spéculaire.
centroïde de l’image 2 FWHM sur les scanners A et B. Une estimation de premier ordre de la quantité de diffusion a été déterminée en définissant une région d’image spéculaire. ![]() 6
6 ![]() 8 à travers centré sur la partie la plus brillante de l’image et une région d’image dispersée commençant au bord de la région spéculaire et s’étendant jusqu’à 40
8 à travers centré sur la partie la plus brillante de l’image et une région d’image dispersée commençant au bord de la région spéculaire et s’étendant jusqu’à 40![]() . La diffusion, définie comme le rapport des comptages dans la région de diffusion au signal total, dépend de la longueur d’onde ; moins de 1 % à 400 Å, augmentant lentement jusqu’à 2 % à 100 Å, puis augmentant jusqu’à 4 % à 44 Å. Aucune tentative n’a été faite pour déconvoluer le flou du détecteur à partir de l’image spéculaire. Ainsi, la lumière diffusée très proche du centre de gravité de l’image n’est pas prise en compte et les valeurs de diffusion déterminées dans cette analyse sont quelque peu sous-estimées. Dans la figure nous traçons la diffusion fractionnaire en fonction de la longueur d’onde observée par les scanners A et B dans les filtres Lex/B et Al/Ti/C. Le scanner C ne montre aucune trace de lumière diffusée. Nous n’avons pas évalué les données crayon-faisceau pour l’enquête en profondeur. Cependant, l’inspection de plusieurs centaines de sources observées depuis le lancement indique que, qualitativement, la diffusion par le sondage profond n’est pas supérieure à celle des scanners A ou B. La conséquence des halos de photoélectrons et de la lumière diffusée est que les ailes des PSF EUVE dépendent de la longueur d’onde, les événements de halo contribuant une grande partie du signal aux longues longueurs d’onde et la lumière diffusée un petit pourcentage aux longueurs d’onde les plus courtes. Toute analyse d’objets astronomiques nécessitant une photométrie absolue doit tenir compte de ces effets. Cependant, comme les bandes passantes Lexan/bore culminent autour de 90 Å pour les scanners A et B et pour le relevé en profondeur, l’effet de la lumière diffusée n’est significatif (> 1 %) que pour les vraies sources de rayons X.
. La diffusion, définie comme le rapport des comptages dans la région de diffusion au signal total, dépend de la longueur d’onde ; moins de 1 % à 400 Å, augmentant lentement jusqu’à 2 % à 100 Å, puis augmentant jusqu’à 4 % à 44 Å. Aucune tentative n’a été faite pour déconvoluer le flou du détecteur à partir de l’image spéculaire. Ainsi, la lumière diffusée très proche du centre de gravité de l’image n’est pas prise en compte et les valeurs de diffusion déterminées dans cette analyse sont quelque peu sous-estimées. Dans la figure nous traçons la diffusion fractionnaire en fonction de la longueur d’onde observée par les scanners A et B dans les filtres Lex/B et Al/Ti/C. Le scanner C ne montre aucune trace de lumière diffusée. Nous n’avons pas évalué les données crayon-faisceau pour l’enquête en profondeur. Cependant, l’inspection de plusieurs centaines de sources observées depuis le lancement indique que, qualitativement, la diffusion par le sondage profond n’est pas supérieure à celle des scanners A ou B. La conséquence des halos de photoélectrons et de la lumière diffusée est que les ailes des PSF EUVE dépendent de la longueur d’onde, les événements de halo contribuant une grande partie du signal aux longues longueurs d’onde et la lumière diffusée un petit pourcentage aux longueurs d’onde les plus courtes. Toute analyse d’objets astronomiques nécessitant une photométrie absolue doit tenir compte de ces effets. Cependant, comme les bandes passantes Lexan/bore culminent autour de 90 Å pour les scanners A et B et pour le relevé en profondeur, l’effet de la lumière diffusée n’est significatif (> 1 %) que pour les vraies sources de rayons X. 
![]() de 1 mm de diamètre qui varient de 10 % en réponse (montrant une amélioration et un déficit) à travers chaque limite d’hexagone. Le motif n’est pas dû à des variations spatiales du QE de la photocathode mais plutôt à une redistribution spatiale des centroïdes d’événement résultant d’une non-linéarité dans la manière dont l’anode échantillonne le nuage de charge d’événement ( Vallerga et al. 1991). En effet, les pixels d’une image d’événement regroupée ne représentent pas des zones égales du détecteur. Alors qu’une réponse de détecteur variant dans l’espace peut profondément influencer les spectres obtenus à partir des trois spectromètres, son effet sur la photométrie des scanners et de l’enquête en profondeur est négligeable. La PSF d’une source imagée à différents endroits sur le détecteur varie un peu dans sa forme, mais les comptages totaux sont constants.
de 1 mm de diamètre qui varient de 10 % en réponse (montrant une amélioration et un déficit) à travers chaque limite d’hexagone. Le motif n’est pas dû à des variations spatiales du QE de la photocathode mais plutôt à une redistribution spatiale des centroïdes d’événement résultant d’une non-linéarité dans la manière dont l’anode échantillonne le nuage de charge d’événement ( Vallerga et al. 1991). En effet, les pixels d’une image d’événement regroupée ne représentent pas des zones égales du détecteur. Alors qu’une réponse de détecteur variant dans l’espace peut profondément influencer les spectres obtenus à partir des trois spectromètres, son effet sur la photométrie des scanners et de l’enquête en profondeur est négligeable. La PSF d’une source imagée à différents endroits sur le détecteur varie un peu dans sa forme, mais les comptages totaux sont constants.
Les PSF sont influencés par les effets combinés de l’optique, des détecteurs et des filtres. Sur la figure , nous montrons la qualité d’image mesurée, caractérisée par le rayon de demi-énergie (HER) en fonction de l’angle hors axe pour chaque télescope (la résolution spatiale par le critère de Rayleigh est de 3,5 fois le HER ![]() pour une gaussienne). Nous adaptons les largeurs d’image mesurées avec un modèle de lancer de rayons de l’optique du télescope convolué avec une gaussienne correspondant à la résolution du détecteur. A un angle hors axe donné, le modèle a deux paramètres libres : le flou du détecteur et la distance du plan du détecteur à l’ouverture d’entrée. Les quatre détecteurs ont montré une résolution de
pour une gaussienne). Nous adaptons les largeurs d’image mesurées avec un modèle de lancer de rayons de l’optique du télescope convolué avec une gaussienne correspondant à la résolution du détecteur. A un angle hors axe donné, le modèle a deux paramètres libres : le flou du détecteur et la distance du plan du détecteur à l’ouverture d’entrée. Les quatre détecteurs ont montré une résolution de ![]() 160
160 ![]() m à FWHM. La ligne continue dans chaque graphique est le modèle de lancer de rayons adapté aux données de vol ( solide points ), et la ligne pointillée l’ajustement du modèle aux données d’étalonnage au sol ( symboles ouverts ). La modélisation du lancer de rayons nous a montré que notre collimateur d’étalonnage au sol ne donnait pas une lumière parfaitement parallèle, mais plutôt un faisceau divergent correspondant à une source ponctuelle vue à une distance de 14 km. Dans les quatre instruments, l’anneau de meilleure mise au point est d’environ un tiers de la distance entre l’axe optique et le bord du champ de vision. Le sacrifice de l’imagerie sur l’axe est moins sévère qu’il n’y paraît à première vue car la structure de support du filtre obstrue complètement la partie centrale du champ de vision dans les scanners A, B et C. Bien que les bandes passantes de l’enquête en profondeur soient très similaires à celles des scanners A et B, l’échelle de l’image, la résolution et la surface effective de l’instrument de levé profond sont chacune environ un facteur de 2
m à FWHM. La ligne continue dans chaque graphique est le modèle de lancer de rayons adapté aux données de vol ( solide points ), et la ligne pointillée l’ajustement du modèle aux données d’étalonnage au sol ( symboles ouverts ). La modélisation du lancer de rayons nous a montré que notre collimateur d’étalonnage au sol ne donnait pas une lumière parfaitement parallèle, mais plutôt un faisceau divergent correspondant à une source ponctuelle vue à une distance de 14 km. Dans les quatre instruments, l’anneau de meilleure mise au point est d’environ un tiers de la distance entre l’axe optique et le bord du champ de vision. Le sacrifice de l’imagerie sur l’axe est moins sévère qu’il n’y paraît à première vue car la structure de support du filtre obstrue complètement la partie centrale du champ de vision dans les scanners A, B et C. Bien que les bandes passantes de l’enquête en profondeur soient très similaires à celles des scanners A et B, l’échelle de l’image, la résolution et la surface effective de l’instrument de levé profond sont chacune environ un facteur de 2 ![]() 3 supérieures aux bandes passantes correspondantes des scanners A et B (voir les tableaux et ).
3 supérieures aux bandes passantes correspondantes des scanners A et B (voir les tableaux et ).
Les scanners A et B et le relevé en profondeur sont sujets au vignettage hors axe. Le scanner C a été conçu pour ne pas avoir de vignettage du miroir. Tous les instruments présentent un certain degré de vignettage au bord du champ de vision, où les images de source ponctuelle de taille finie tombent partiellement au-delà du bord des détecteurs. De plus, tous les instruments présentent du vignettage (ou, plus exactement, de l’ombrage) sous les structures de support du cadre du filtre. Des cartes de vignettage ont été construites en combinant des modèles de lancer de rayons et des images d’arrière-plan diffuses en orbite, à longue exposition (dont des exemples sont illustrés à la Fig. , en haut). Le profil de vignettage en fonction de l’angle hors axe est présenté sur la figure ( en bas) pour chaque instrument. Les structures de support de filtre bloquent 100 % du rayonnement incident le long de leurs centres mais bloquent moins de 100 % le long de leurs bords en raison des propriétés d’imagerie miroir et du flou du détecteur (5). ZONES EFFICACES
(5). ZONES EFFICACES
La bande passante des six EUVEest défini par la réflectivité des miroirs, la transmission des filtres et l’efficacité de détection quantique des détecteurs. Cependant, les instruments de vol n’ont été étalonnés qu’à des longueurs d’onde EUV et rayons X discrètes disponibles à l’installation d’étalonnage de Berkeley. Afin de combler les lacunes de l’étalonnage de la surface effective dans la région de longueur d’onde entre les points mesurés, nous nous sommes appuyés sur les mesures de continuum de filtre effectuées à SURF. Les courbes de transmission du filtre continu EUV modèle ont été générées en combinant les mesures photométriques discrètes de Berkeley du débit, les transmissions du filtre continu SURF et les propriétés de transmission mesurées des constituants individuels du filtre. Ces courbes, à leur tour, ont été multipliées par les réflectivités connues des miroirs, les QE des détecteurs et les zones géométriques de chaque ensemble de miroirs,2 ) en fonction de la longueur d’onde pour chacune des bandes passantes du relevé. Sur la figure , les lignes pleines représentent les courbes de surface effective du modèle pour les deux filtres, de matériaux différents, sur chaque instrument. Les points sont les mesures discrètes du laboratoire de Berkeley du débit (mis à l’échelle par les zones géométriques des ouvertures du télescope), et les zones pointillées délimitent les bandes passantes à 10% des filtres. Les incertitudes dans les points de données discrets étaient dominées par l’incertitude des valeurs absolues du QE de la diode EUV standard d’étalonnage fournie par le NIST. L’incertitude est tracée pour chaque point de la figure et, dans la plupart des cas, elle est inférieure à la taille du symbole. Les courbes du modèle correspondent étonnamment bien aux mesures discrètes (le résidu rms est généralement inférieur à 30 %), étant donné que la génération du modèle implique une combinaison d’autres ensembles de données, chacun avec ses propres erreurs systématiques et de mesure. Les déviations les plus importantes se produisent aux longueurs d’onde en aval et en aval des bandes passantes de 10 %. Les zones effectives pour les longueurs d’onde inférieures à 68 Å ne sont pas fiables, car les instruments n’ont été calibrés qu’au K
Les courbes du modèle correspondent étonnamment bien aux mesures discrètes (le résidu rms est généralement inférieur à 30 %), étant donné que la génération du modèle implique une combinaison d’autres ensembles de données, chacun avec ses propres erreurs systématiques et de mesure. Les déviations les plus importantes se produisent aux longueurs d’onde en aval et en aval des bandes passantes de 10 %. Les zones effectives pour les longueurs d’onde inférieures à 68 Å ne sont pas fiables, car les instruments n’ont été calibrés qu’au K![]() des raies de carbone et de bore (44 Å et 68 Å, respectivement), qui se situent au-dessus des arêtes K fortement atténuantes de chacun de ces éléments qui sont des constituants majeurs des filtres Lexan/bore. Les observations de la source brillante de rayons X doux Sco X1, qui est fortement atténuée dans l’EUV, obtenue dans le filtre Lexan de l’enquête profonde indiquent que le débit en dessous de 44 Å est inférieur à 0,002 celui du pic de bande passante à 91 Å (D . Christian 1996, communication privée). Bien que les filtres Lexan/bore pour le levé profond et les scanners A et B soient identiques, les courbes de surface effective diffèrent en raison des différents angles de rasage des télescopes. Les angles plus grands utilisés par le levé profond entraînent une plus grande ouverture géométrique du télescope, tandis que les angles de rasage plus petits des scanners A et B offrent une réflectivité plus élevée aux longueurs d’onde les plus courtes. Ainsi,
des raies de carbone et de bore (44 Å et 68 Å, respectivement), qui se situent au-dessus des arêtes K fortement atténuantes de chacun de ces éléments qui sont des constituants majeurs des filtres Lexan/bore. Les observations de la source brillante de rayons X doux Sco X1, qui est fortement atténuée dans l’EUV, obtenue dans le filtre Lexan de l’enquête profonde indiquent que le débit en dessous de 44 Å est inférieur à 0,002 celui du pic de bande passante à 91 Å (D . Christian 1996, communication privée). Bien que les filtres Lexan/bore pour le levé profond et les scanners A et B soient identiques, les courbes de surface effective diffèrent en raison des différents angles de rasage des télescopes. Les angles plus grands utilisés par le levé profond entraînent une plus grande ouverture géométrique du télescope, tandis que les angles de rasage plus petits des scanners A et B offrent une réflectivité plus élevée aux longueurs d’onde les plus courtes. Ainsi,![]() 2.2. Dans le sens de la longueur de 70 Å (qui inclut le pic de bande passante Lexan/bore à 91 Å), la zone effective de levé profond est supérieure à celle des scanners A et B d’un facteur de
2.2. Dans le sens de la longueur de 70 Å (qui inclut le pic de bande passante Lexan/bore à 91 Å), la zone effective de levé profond est supérieure à celle des scanners A et B d’un facteur de ![]() 2,3
2,3 (6). STABILITÉ PHOTOMÉTRIQUE
(6). STABILITÉ PHOTOMÉTRIQUE
EUVE a observé 15 naines blanches à des fins de calibration. L’étoile brillante EUV HZ 43 (type spectral DA1) a été observée trois fois sur une période de 3 ans depuis son lancement, et V471 Tau (type spectral DA1) a été observée deux fois par le DS/S. Tout en comprenant un jeu de données très hétérogène (les erreurs systématiques dominent les erreurs de Poisson d’un ordre de grandeur), ces naines blanches démontrent la stabilité photométrique de l’observatoire. Les trois scanners affichent des taux de comptage constants au niveau de 10 %. Les comparaisons des taux de comptage V471 Tau du relevé profond aux taux de comptage intégrés obtenus simultanément à partir du spectromètre à courte longueur d’onde montrent que la bande passante Lex/B du relevé profond est stable à mieux que 10 % (J. Dupuis 1996, communication privée). Il n’existe aucune preuve de dégradation de la réponse ou de contamination des détecteurs à plaque à microcanaux, de l’optique du télescope ou des filtres passe-bande. Nous montrons, dans Figure , les taux de comptage mesurés couvrant 900 jours pour HZ 43 dans les quatre bandes passantes du relevé. L’effet cumulatif d’observations multiples de sources lumineuses EUV sur l’axe de visée DS a entraîné une dégradation du gain, et donc de la réponse, puisque les événements ne dépassent pas le seuil d’impulsion inférieur sur un petit point ( 2 1 FWHM) ![]() sur
sur ![]() le détecteur (décrit dans détail par Vallerga et al. 1994 ). Cet effet a été atténué sur le plan opérationnel par de petits pointages décalés d’au moins 2
le détecteur (décrit dans détail par Vallerga et al. 1994 ). Cet effet a été atténué sur le plan opérationnel par de petits pointages décalés d’au moins 2 ![]() par rapport à l’axe de visée du levé profond.
par rapport à l’axe de visée du levé profond.  (7). DISCUSSION
(7). DISCUSSION
L’ EUVEl’optique a fonctionné comme prévu ; le rayonnement EUV stellaire est bien focalisé, la lumière diffusée composant moins de 2% du signal total vers la longueur de 70 Å. Les modèles de lancer de rayons se sont avérés utiles pour déterminer les propriétés d’imagerie, les résolutions des détecteurs, les fonctions de vignettage et les positions des plans des détecteurs pour les quatre instruments. Les PSF dépendent de la position par rapport à l’axe optique et de la longueur d’onde. Les variations à petite échelle du gain du détecteur rendent impossible la modélisation analytique des PSF. Cependant, cette limitation ne compromet pas les capacités photométriques des instruments d’imagerie, car la photométrie d’ouverture s’est avérée assez robuste. Les combinaisons détecteur et filtre ont également fonctionné comme prévu et sont conformes aux étalonnages au sol. Le DS/S a observé plus de 250 objets différents en mode pointé depuis son lancement. La précision de position absolue sur le ciel est d’environ 28![]() rms et est dominé par la flexion thermique entre le DS/S et le système de contrôle d’attitude du satellite ( Abbott et al. 1996 ). Les centroïdes relatifs des sources sur les détecteurs sont précis à 1 pixel près. Les propriétés d’imagerie et photométriques se sont avérées stables au cours des 4 ans depuis le lancement. Les télescopes imageurs ont parfaitement fonctionné, à l’exception de trois fuites de trous d’épingle de filtre connues, du petit point mort sur l’étude en profondeur et d’une fuite d’UV lointain dans le filtre A du scanner Al/Ti/C ( Vallerga et al. 1994 ) .
rms et est dominé par la flexion thermique entre le DS/S et le système de contrôle d’attitude du satellite ( Abbott et al. 1996 ). Les centroïdes relatifs des sources sur les détecteurs sont précis à 1 pixel près. Les propriétés d’imagerie et photométriques se sont avérées stables au cours des 4 ans depuis le lancement. Les télescopes imageurs ont parfaitement fonctionné, à l’exception de trois fuites de trous d’épingle de filtre connues, du petit point mort sur l’étude en profondeur et d’une fuite d’UV lointain dans le filtre A du scanner Al/Ti/C ( Vallerga et al. 1994 ) .
Repos en morceaux, EUVE
Le 31 janvier 2001, le satellite Extreme Ultraviolet Explorer (EUVE) a été arrêté et mis en mode hibernation, victime d’une diminution du budget de la NASA. Un an plus tard, l’engin a complètement mis fin à sa vie, brûlant lors de sa rentrée dans l’atmosphère terrestre au-dessus du centre de l’Égypte.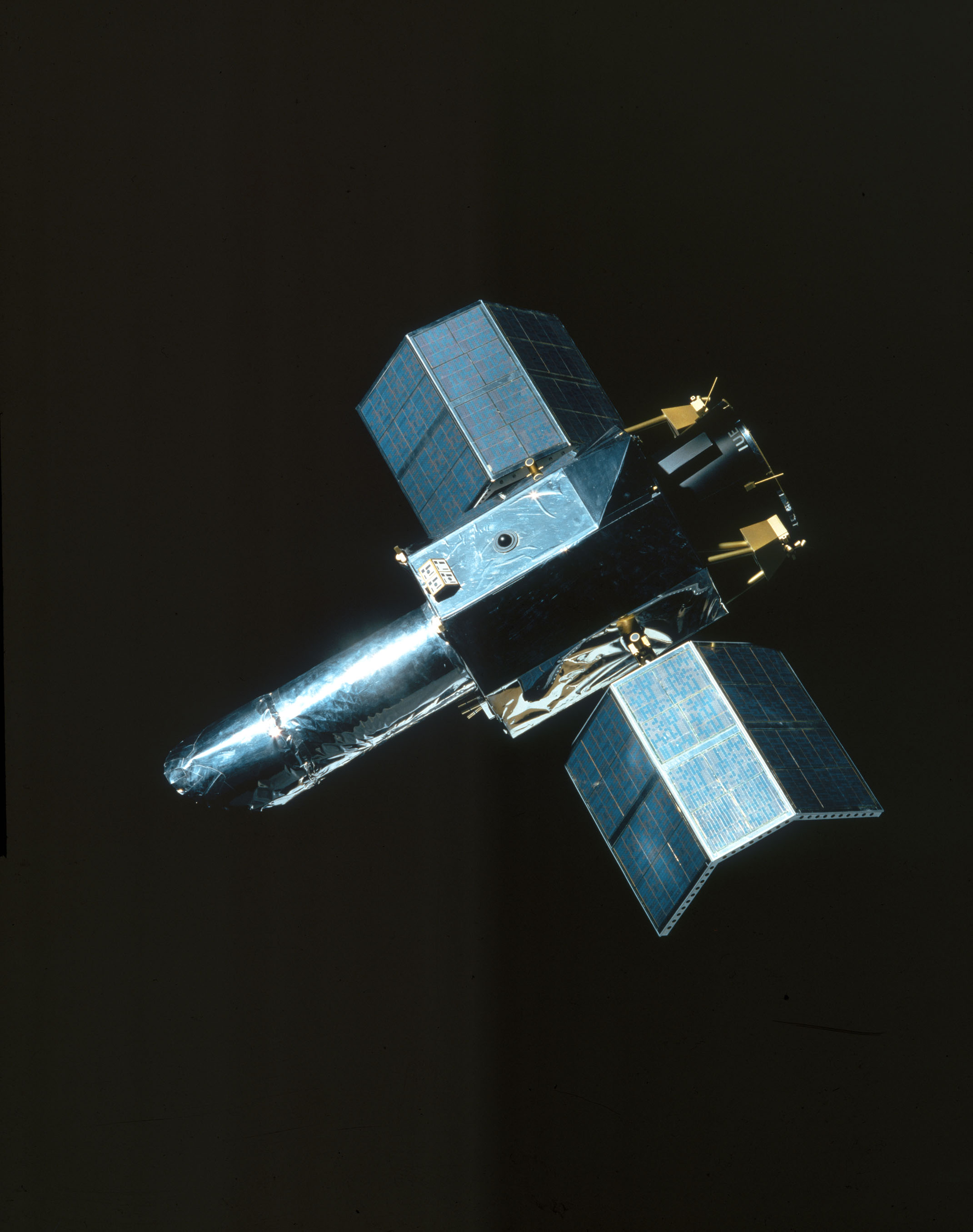 EUVE était un élément clé de la flotte de télescopes spatiaux de la NASA, remplissant le créneau des longueurs d’onde ultraviolettes extrêmes. Depuis son lancement le 7 juin 1992 jusqu’à son démantèlement l’année dernière, EUVE n’a « jamais quitté le mode scientifique pendant plus de deux jours », explique Brett Stroozas (Université de Californie, Berkeley). « C’est un excellent vaisseau spatial. » La NASA a prolongé la durée de vie de 3 ans de la mission à deux reprises, et au début de l’année dernière, les scientifiques ont mené une campagne de rédaction de lettres ratée pour persuader la NASA de poursuivre la mission.
EUVE était un élément clé de la flotte de télescopes spatiaux de la NASA, remplissant le créneau des longueurs d’onde ultraviolettes extrêmes. Depuis son lancement le 7 juin 1992 jusqu’à son démantèlement l’année dernière, EUVE n’a « jamais quitté le mode scientifique pendant plus de deux jours », explique Brett Stroozas (Université de Californie, Berkeley). « C’est un excellent vaisseau spatial. » La NASA a prolongé la durée de vie de 3 ans de la mission à deux reprises, et au début de l’année dernière, les scientifiques ont mené une campagne de rédaction de lettres ratée pour persuader la NASA de poursuivre la mission.
Supernova dans NGC 4411B et Lancement réussi de l’Extreme Ultraviolet Explorer de la NASA et détection de la première lumière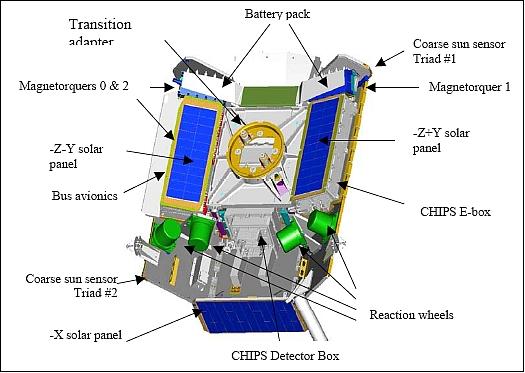 SUPERNOVA DANS NGC 4411B
SUPERNOVA DANS NGC 4411B
Nous avons été informés par Robert O. Evans (Hazelbrook, Australie), président du comité de recherche de supernova de l’AAVSO et du Bureau central des télégrammes astronomiques ( circulaire IAU 5552) de la découverte visuelle par Robert Evans d’une supernova dans NGC 4411B en juillet 1,375 UT à une magnitude d’environ 13,5. La supernova a été confirmée visuellement par Thomas Cragg (télescope anglo-australien, Coonabarabran, Australie) le 2,4 juillet TU.La supernova est située à 40 secondes à l’est et 40 secondes au sud du noyau de la galaxie. La position de la supernova en 1950, mesurée par Robert NcNaiught (Anglo-Australian Observatory), est :
AR 12 24 17.04 Déc. +09 09 14.2
Il y a une étoile de magnitude 13,0 sur le côté nord-ouest de la galaxie à RA 12 24 10,24, décembre +09 10 24,4.
La circulaire 5552 de l’UAI rapporte que les observations spectroscopiques à l’AAT le 2 juillet ont montré « des raies d’hydrogène de Balmer avec des progiles de raie P-Cyg caractéristiques, indiquant une supernova de type II ».
Vous trouverez ci-joint des cartes de recherche du champ tirées du Photographic Atlas for Supernova Search , Volume II , de Manuel Lopez Alvarez, et du AAVSO Variable Star Atlas . Le tableau à l’échelle AAVSO ‘c’ gfor R Vir, qui est assez proche de la galaxie, est également accompagné.
Toutes nos félicitations à Bob pour sa première découverte de 1992 !
Extreme Ultraviolet Explorer (EUVE) de la NASA a été lancé avec succès le 7 juin 1992 depuis Cap Canaveral en Floride sur une fusée Delta. Les sept détecteurs de l’observatoire EUVE ont été allumés avec succès le 21 juin et les premières images du ciel EUV ont été obtenues. Le satellite commencera son enquête fin juillet. En collaboration avec l’équipe scientifique d’EUVE, nous avons finalisé les cibles que les observateurs d’étoiles variables du monde entier surveilleront pour EUVE. Tous les observateurs seront informés de ces cibles et des informations sur les cartes de recherche les concernant très prochainement. Veuillez garder un œil attentif sur les variables cataclysmiques observables, car la plupart des objets de notre liste d’observation EUVE sont des variables cataclysmiques.
Merci beaucoup pour vos efforts et vos observations. Bonne observation !
https://iopscience.iop.org/article/10.1086/313002/fulltext/35307.text.html
https://heasarc.gsfc.nasa.gov/docs/euve/euvegof.html
https://skyandtelescope.org/astronomy-news/rest-in-pieces-euve/
https://www.aavso.org/aavso-alert-notice-158