 Mises à jour de la mission STS-119 : 1re partie
Mises à jour de la mission STS-119 : 1re partie STS-119 – Discovery (36) 125e mission de la navette spatiale
STS-119 – Discovery (36) 125e mission de la navette spatiale Informations sur la mission STS-119
Informations sur la mission STS-119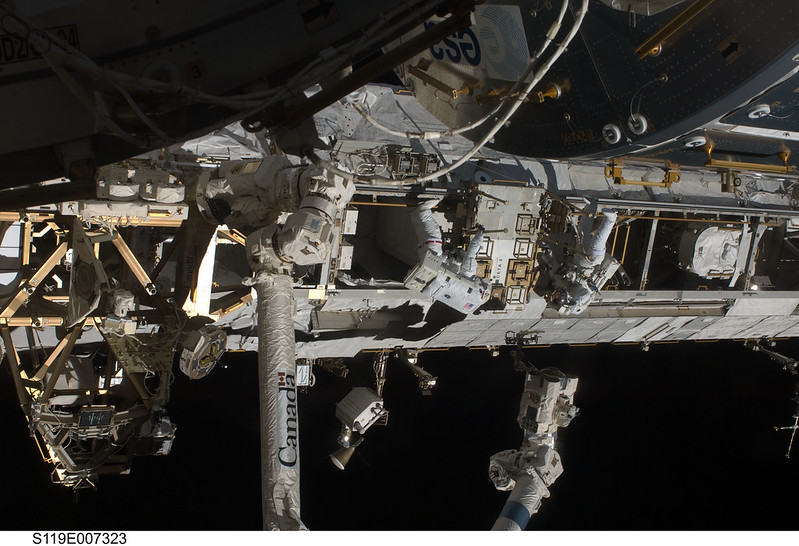 Décollage et atterrissage
Décollage et atterrissage Discovery dans l’espace STS-119
Discovery dans l’espace STS-119 La première des quatre sorties spatiales de la mission a lieu le cinquième jour de vol pour l’installation du segment S6. Les marcheurs de l’espace Steve Swanson et Richard Arnold travaillent à l’extérieur et aident John Phillips, qui est à l’intérieur de la station, à manœuvrer le Canadarm2 pour la mise en place du segment de poutrelle.
La première des quatre sorties spatiales de la mission a lieu le cinquième jour de vol pour l’installation du segment S6. Les marcheurs de l’espace Steve Swanson et Richard Arnold travaillent à l’extérieur et aident John Phillips, qui est à l’intérieur de la station, à manœuvrer le Canadarm2 pour la mise en place du segment de poutrelle.
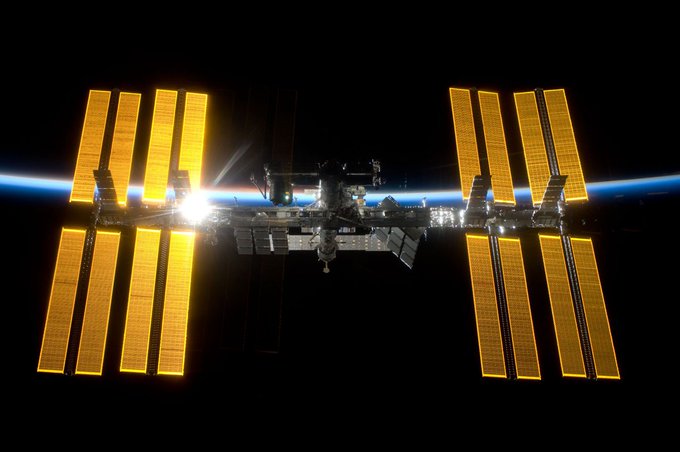
Pendant les six heures et sept minutes de la sortie, ils ont notamment boulonné S6 à S5 et établi les connections électriques et de données. Ils installent ensuite le segment S6 et préparent les panneaux solaires en vue de leur déploiement. Après d’autres travaux préparatoires menés lors d’une deuxième sortie le septième jour, les panneaux solaires sont déployés le huitième jour et rendent la station encore plus brillante aux yeux des observateurs du monde entier. La mission de Discovery, la première d’une navette en 2009, a surtout permis de livrer et d’installer la quatrième et dernière antenne solaire à double aile, dernier gros élément structurel de l’ISS. La Station, un projet de 100 milliards de dollars auquel participent 16 pays, dispose ainsi de toute l’électricité nécessaire pour effectuer les expériences scientifiques des laboratoires européen Columbus et japonais Kibo attachés à l’ISS en 2008 et doubler à six membres en mai l’équipage permanent de l’ISS.
Ils installent ensuite le segment S6 et préparent les panneaux solaires en vue de leur déploiement. Après d’autres travaux préparatoires menés lors d’une deuxième sortie le septième jour, les panneaux solaires sont déployés le huitième jour et rendent la station encore plus brillante aux yeux des observateurs du monde entier. La mission de Discovery, la première d’une navette en 2009, a surtout permis de livrer et d’installer la quatrième et dernière antenne solaire à double aile, dernier gros élément structurel de l’ISS. La Station, un projet de 100 milliards de dollars auquel participent 16 pays, dispose ainsi de toute l’électricité nécessaire pour effectuer les expériences scientifiques des laboratoires européen Columbus et japonais Kibo attachés à l’ISS en 2008 et doubler à six membres en mai l’équipage permanent de l’ISS. Informations sur la mission STS-119
Informations sur la mission STS-119
Le colonel de la Force aérienne Lee Archambault a dirigé l’équipage du STS-119 et le Cmdr de la Marine. Tony Antonelli a servi de pilote. Les spécialistes de mission pour le vol étaient les astronautes de la NASA Joseph Acaba, John Phillips, Steve Swanson, Richard Arnold et l’astronaute de l’Agence japonaise d’exploration aérospatiale Koichi Wakata. Wakata est resté sur la station, remplaçant l’ingénieur de vol de l’expédition 18 Sandra Magnus, qui est revenue sur Terre avec l’équipage du STS-119. Il est ingénieur de vol pour les expéditions 18 et 19, et il reviendra sur Terre pour la mission de navette STS-127. STS-119 est la 28e mission de navette vers la Station spatiale internationale. Discovery a également transporté le segment de treillis S6 jusqu’à l’avant-poste orbital.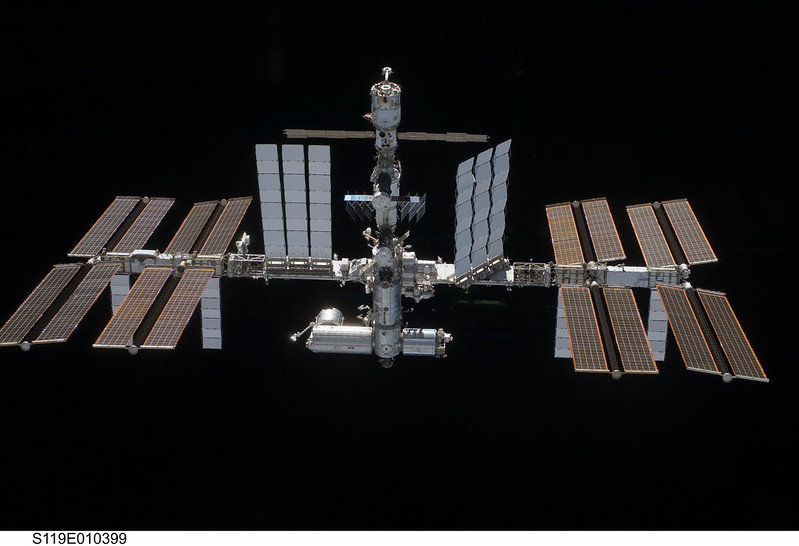 Décollage et atterrissage
Décollage et atterrissage
Mission : STS-119
Orbiteur : Discovery
Charge utile principale : Segment de poutrelle S6 et panneaux solaires américains
Lancement : 15 mars
Heure de lancement : 19 h 43 HAE
Base de lancement : 39A
Durée de la mission : 13 jours
Date d’atterrissage : 28 mars 2009
Heure d’atterrissage : 15 h 14 HAE
Site d’atterrissage : Centre spatial Kennedy, Floride
Inclinaison/altitude : 51,6 degrés/122 milles nautiques STS-119 : Mise sous tension de la Station spatiale internationale
STS-119 : Mise sous tension de la Station spatiale internationale
La navette spatiale Discovery a décollé du Centre spatial Kennedy de la NASA, en Floride, à 19 h 43 (heure de l’Est) le 15 mars, dans un nuage et une fumée intense, dans un ciel nocturne et crépusculaire. Atteignant l’orbite en quelques minutes, la mission STS-119 visant à alimenter la Station spatiale internationale en énergie était déjà bien entamée.
Le commandant Lee Archambault dirigeait l’équipage de sept personnes, qui comprenait le pilote Tony Antonelli, les spécialistes de mission Joseph Acaba, Steve Swanson, Richard Arnold, John Phillips et l’astronaute de l’Agence japonaise d’exploration aérospatiale Koichi Wakata. Quelques retards de lancement antérieurs n’ont pas refroidi le moral des astronautes, car ils se sont rapidement mis au travail en prenant des images de précaution des tuiles de protection thermique de la navette et en se préparant à s’amarrer à la station spatiale deux jours plus tard.
Quelques retards de lancement antérieurs n’ont pas refroidi le moral des astronautes, car ils se sont rapidement mis au travail en prenant des images de précaution des tuiles de protection thermique de la navette et en se préparant à s’amarrer à la station spatiale deux jours plus tard.
La mission de 13 jours comprenait trois sorties dans l’espace pour installer le treillis S6 et les panneaux solaires américains tribord. L’équipage de la navette a également livré et aidé à installer une centrifugeuse d’assemblage de distillation de remplacement dans le système de recyclage de l’eau de la station. Avec les panneaux solaires et le système de recyclage opérationnels, le laboratoire en orbite peut doubler la taille de son équipage à six. L’un des moments forts de la mission a été un appel du président américain Barack Obama aux membres de l’équipage de la navette et de la station réunis dans le module Harmony. Le président, les membres du Congrès et les étudiants ont posé des questions sur la mission et sur la vie à bord de la station. Avec la mission complexe derrière eux, il était temps de dire adieu aux membres de l’équipage de l’Expédition 18-19. Après s’être désamarrés, les astronautes ont effectué une dernière inspection du système de protection thermique de Discovery et ont commencé leur voyage de retour sur Terre.
L’un des moments forts de la mission a été un appel du président américain Barack Obama aux membres de l’équipage de la navette et de la station réunis dans le module Harmony. Le président, les membres du Congrès et les étudiants ont posé des questions sur la mission et sur la vie à bord de la station. Avec la mission complexe derrière eux, il était temps de dire adieu aux membres de l’équipage de l’Expédition 18-19. Après s’être désamarrés, les astronautes ont effectué une dernière inspection du système de protection thermique de Discovery et ont commencé leur voyage de retour sur Terre. Wakata est resté à bord de la station, remplaçant l’ingénieur de vol Sandra Magnus. Magnus est revenu sur Terre avec l’équipage du STS-119 après plus de quatre mois de vie et de travail dans l’espace. Bien que la première opportunité d’atterrissage à Kennedy ait été annulée en raison de vents violents, Discovery a glissé vers un atterrissage parfait à l’installation d’atterrissage de la navette de Kennedy à 15h14. HAE le 28 mars, complétant avec succès la mission STS-119 de la NASA.
Wakata est resté à bord de la station, remplaçant l’ingénieur de vol Sandra Magnus. Magnus est revenu sur Terre avec l’équipage du STS-119 après plus de quatre mois de vie et de travail dans l’espace. Bien que la première opportunité d’atterrissage à Kennedy ait été annulée en raison de vents violents, Discovery a glissé vers un atterrissage parfait à l’installation d’atterrissage de la navette de Kennedy à 15h14. HAE le 28 mars, complétant avec succès la mission STS-119 de la NASA. Fiche d’information STS-119 // STS-119 – Discovery
Fiche d’information STS-119 // STS-119 – Discovery Équipage:
Équipage:
Lee Archambault, commandant
Tony Antonelli, pilote
Richard Arnold, spécialiste de mission
Joseph Acaba, spécialiste de mission
John Phillips, spécialiste de mission
Steve Swanson, spécialiste de mission
Kiochi Wakata, spécialiste de mission, embarquement pour la Station spatiale internationale
Sandra Magnus, ingénieure de vol, de retour de la Station spatiale internationale Préparations de l’orbiteur :
Préparations de l’orbiteur :
Remorquage à l’installation de traitement Orbiter – 14 juin 2008
Transfert au bâtiment d’assemblage des véhicules – 7 janvier 2009
Déploiement sur la rampe de lancement 39A – 14 janvier 2009
Lancement: 15 mars 2009 – 19 h 43 HAE. Le lancement était initialement prévu pour le 12 février mais a été reporté après qu’un problème est apparu avec les vannes de contrôle du débit d’hydrogène gazeux. Les soupapes ont été remplacées. La tentative de lancement du 11 mars a été reportée en raison d’une fuite d’hydrogène dans une conduite d’évent d’hydrogène liquide entre la navette et le réservoir externe. Le lancement du 15 mars a eu lieu à temps, sans retard. Atterrissage:
Atterrissage:
28 mars 2009 – 15 h 14 min 45 s HAE à la piste 15, Kennedy Space Center. La première occasion d’atterrissage a été annulée en raison du mauvais temps. La durée de la mission était de 12 jours, 19 heures, 31 minutes, 1 seconde. Résumé des missions : L’objectif principal de la mission était de livrer le quatrième et dernier ensemble de panneaux solaires de la Station spatiale internationale (ISS) et le S6 Truss, complétant l’épine dorsale de l’ISS. Il y a eu trois sorties dans l’espace au cours de la mission. La première sortie dans l’espace a eu lieu le 19 mars et a duré 6 heures et 7 minutes. Les astronautes Swanson et Arnold ont boulonné le S6 Truss en place et ont connecté les câbles d’alimentation et de données.
Résumé des missions : L’objectif principal de la mission était de livrer le quatrième et dernier ensemble de panneaux solaires de la Station spatiale internationale (ISS) et le S6 Truss, complétant l’épine dorsale de l’ISS. Il y a eu trois sorties dans l’espace au cours de la mission. La première sortie dans l’espace a eu lieu le 19 mars et a duré 6 heures et 7 minutes. Les astronautes Swanson et Arnold ont boulonné le S6 Truss en place et ont connecté les câbles d’alimentation et de données.
La deuxième sortie dans l’espace a eu lieu le 21 mars et a duré 6 heures et 30 minutes. Les astronautes Swanson et Acaba ont préparé un site de travail pour les nouvelles batteries de l’ISS et installé une antenne du système de positionnement global sur le laboratoire KIBO. La troisième sortie dans l’espace a eu lieu le 23 mars et a duré 6 heures et 27 minutes. Les astronautes Acaba et Arnold ont déplacé l’un des deux chariots d’équipement de l’équipage et lubrifié le bras robotique de l’ISS.
Mises à jour de la mission STS-119 : 1re partie
Navette ?Aller? pour approcher l’ISS
17 mars 2009 14 h 25 HAE
Mission Control a donné à la navette spatiale Discovery le feu vert pour lancer ses moteurs afin de commencer à s’approcher de la Station spatiale internationale pour l’amarrage prévu aujourd’hui à 17 h 13 HAE (21 h 13 GMT). La combustion du moteur doit commencer à 14 h 34 HAE (18 h 34 GMT). Le contrôle de mission a déclaré au commandant de la station spatiale Michael Fincke que Discovery était prêt pour la manœuvre et sur la bonne voie pour accoster aujourd’hui.
« Grande nouvelle! », A déclaré Fincke. « Nous sommes impatients d’y être. » Discovery est au milieu d’une mission de 13 jours pour livrer à la station une paire de panneaux solaires construits aux États-Unis d’une valeur de 298 millions de dollars et l’astronaute japonais Koichi Wakata. Wakata remplacera l’astronaute de la NASA Sandra Magnus en tant qu’ingénieur de vol de la station. Aujourd’hui, c’est le troisième jour de vol de la mission de 13 jours de Discovery vers la Station spatiale internationale.
Discovery est au milieu d’une mission de 13 jours pour livrer à la station une paire de panneaux solaires construits aux États-Unis d’une valeur de 298 millions de dollars et l’astronaute japonais Koichi Wakata. Wakata remplacera l’astronaute de la NASA Sandra Magnus en tant qu’ingénieur de vol de la station. Aujourd’hui, c’est le troisième jour de vol de la mission de 13 jours de Discovery vers la Station spatiale internationale. STS-119 – Discovery (36) 125e mission de la navette spatiale
STS-119 – Discovery (36) 125e mission de la navette spatiale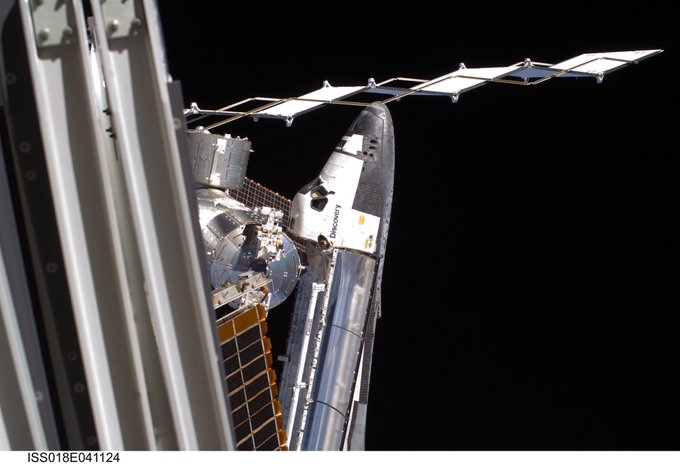
Décollage de Cap Canaveral ( KSC ) et atterrissage à Cap Canaveral ( KSC ), piste 15.
Le lancement a été frotté plusieurs fois en raison de problèmes de navette en général avec des vannes de contrôle de débit d’hydrogène, puis en raison d’une fuite dans une conduite d’évent d’hydrogène liquide entre le navette et le réservoir externe. Le résultat a été le renoncement à un quatrième EVA prévu au cours de cette mission, car la mission Soyouz suivante avait besoin d’un port d’amarrage sur la station spatiale. STS -119 ( ISS 15A ITS – S6 ) a livré et assemblé le quatrième segment de treillis intégré tribord ( S6 ), et le quatrième ensemble de panneaux solaires et de batteries à la station.
STS -119 ( ISS 15A ITS – S6 ) a livré et assemblé le quatrième segment de treillis intégré tribord ( S6 ), et le quatrième ensemble de panneaux solaires et de batteries à la station.
Koichi Wakata est resté sur la station, rejoignant le commandant de l’expédition 18 Michael Fincke et l’ingénieur de vol Yuri Lonchakov .
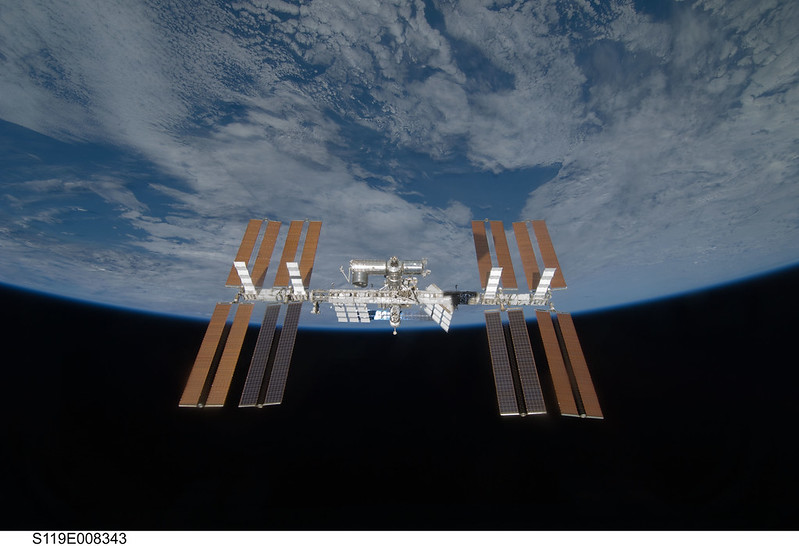
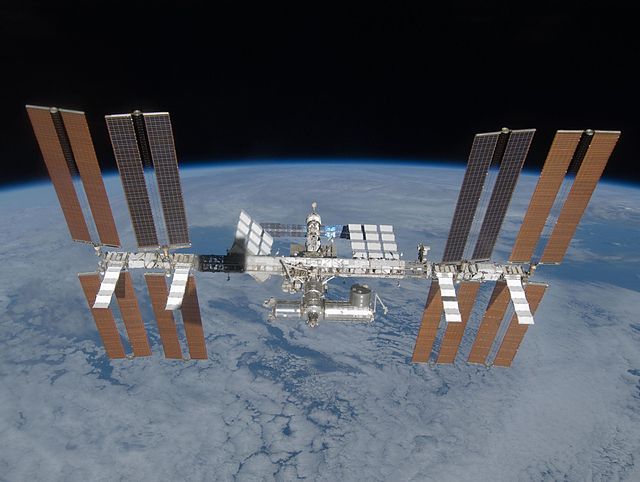
 STS -119 a livré le dernier segment de treillis américain majeur de la Station spatiale internationale, Starboard 6 ( S6 ), fournissant la capacité de production d’électricité à un équipage de six personnes pour mener des activités scientifiques accrues. Avec ses deux Solar Array Wings (SAW) pour convertir l’énergie solaire en électricité et un radiateur pour évacuer la chaleur des composants électriques, le S6 est l’élément de treillis final et complète la structure en treillis intégrée ( ITS ) à 11 segments de la station . Également appelé module photovoltaïque (PVM) en raison de sa capacité à générer, stocker et distribuer de l’énergie électrique à la station, le segment Starboard 6 garantira que l’avant-poste est alimenté à son potentiel maximal prévu.
STS -119 a livré le dernier segment de treillis américain majeur de la Station spatiale internationale, Starboard 6 ( S6 ), fournissant la capacité de production d’électricité à un équipage de six personnes pour mener des activités scientifiques accrues. Avec ses deux Solar Array Wings (SAW) pour convertir l’énergie solaire en électricité et un radiateur pour évacuer la chaleur des composants électriques, le S6 est l’élément de treillis final et complète la structure en treillis intégrée ( ITS ) à 11 segments de la station . Également appelé module photovoltaïque (PVM) en raison de sa capacité à générer, stocker et distribuer de l’énergie électrique à la station, le segment Starboard 6 garantira que l’avant-poste est alimenté à son potentiel maximal prévu.
Une caractéristique unique sur le S6est qu’il transportera deux unités de charge/décharge de batterie de rechange (BCDU), utilisées pour contrôler la charge et la décharge des batteries de rechange sur la station. Le segment S6 a été modifié pour transporter les BCDU supplémentaires, attachés à la structure Long Spacer Truss du segment.
Les panneaux solaires de la station spatiale sont les plus grands ensembles spatiaux déployables jamais construits et les panneaux de production d’électricité les plus puissants en orbite. Jusqu’à son déploiement, chaque SAW reste pliée dans une cartouche spéciale appelée Solar Array Assembly (SAA) à la fin du S6élément. Dans le canister, chaque aile est équipée d’un mât extensible. Deux boîtes de couverture de panneaux solaires, contenant 32 800 cellules solaires, sont connectées aux extrémités de chaque cartouche et sont retenues au cadre de l’élément pour le lancement. L’ajout de S6 porte à huit le nombre total de SAW de la station. Chaque aile mesure 115 pieds sur 38 (35,1 sur 11,6 mètres) de large et, lorsque les huit seront entièrement déployées, couvrira une superficie de 32 528 pieds carrés (3 022 mètres carrés), moins les mâts.
La structure en treillis intégrée de 310 pieds (94,5 mètres) à laquelle le S6 sera attaché constitue l’épine dorsale de la station spatiale, avec des supports pour les transporteurs logistiques non pressurisés, les radiateurs, les panneaux solaires et les divers éléments. Le S6 de 45 pieds (13,7 mètres) de longa commencé comme un élément de test d’exploitation pour sa sœur jumelle, le segment de treillis Port 6 qui a été lancé lors de la mission STS-97 d’Endeavour le 30 novembre 2000.
Les segments de treillis intégrés ont commencé par Starboard 0 ( S0 ) comme affectation centrale et ont été numérotés en ordre croissant vers l’extérieur vers les côtés bâbord (P) et tribord (S). Le tribord est le côté droit et le port est le côté gauche de la structure en treillis. Zénith (Z) est vers le haut, lorsque la station vole dans son orientation normale. À un moment donné, un S2 et un P2 étaient prévus, mais ils ont été éliminés lorsque la conception de la station a été réduite. A partir de S0 , les segments de treillis sont P1 , P3 , P4 ,P5 et P6 et S1 , S3 , S4 , S5 et S6 . P6 est attaché à P5 , et une fois en orbite S6 était attaché à S5 . La structure primaire du S6 est constituée d’une structure en aluminium de forme hexagonale et comprend quatre cloisons et six longerons, qui sont des poutres qui relient les cloisons.
Lors de la mission STS -119, S6 a été retiré de la soute avec le bras robotique de la station spatiale car le bras de la navette est incapable de retirer l’élément avec la configuration actuelle de la station. LeL’élément S6 a ensuite été remis au bras de la navette et manœuvré vers un autre emplacement, tandis que le bras de la station a changé de point de base. Le S6 a ensuite été remis au bras de la station et manœuvré jusqu’à une position de stationnement de nuit. Le retrait de la ferme de la baie de charge utile et la manœuvre vers une position de stationnement de nuit ont pris une journée entière. Le lendemain, la poutre a été installée lors d’une sortie dans l’espace prévue. Une fois le segment de ferme final attaché, S6 a pris en charge la production et le stockage d’énergie, le routage des services publics, la distribution d’énergie et le stockage de l’unité de remplacement orbitale ( ORU ). Les principaux sous-systèmes de la poutrelle S6 sont le module photovoltaïque extérieur tribord (PVM), le radiateur photovoltaïque (PVR), le Long Spacer Truss (LST) et le Modified Rocketdyne Truss Attachment System (MRTAS). Le S6 PVM comprend tous les équipements hors-bord du S5 , à savoir les deux assemblages de panneaux photovoltaïques (PVAA) et l’assemblage d’équipements intégrés (IEA). Le PVR fournit un refroidissement thermique pour l’IEA. Le MRTAS est utilisé pour fournir une interface structurelle à l’ élément de ferme S5 . Chaque PVAA se compose d’un ensemble SAW et Beta Gimbal (BGA).
Les principaux sous-systèmes de la poutrelle S6 sont le module photovoltaïque extérieur tribord (PVM), le radiateur photovoltaïque (PVR), le Long Spacer Truss (LST) et le Modified Rocketdyne Truss Attachment System (MRTAS). Le S6 PVM comprend tous les équipements hors-bord du S5 , à savoir les deux assemblages de panneaux photovoltaïques (PVAA) et l’assemblage d’équipements intégrés (IEA). Le PVR fournit un refroidissement thermique pour l’IEA. Le MRTAS est utilisé pour fournir une interface structurelle à l’ élément de ferme S5 . Chaque PVAA se compose d’un ensemble SAW et Beta Gimbal (BGA).
S6 était le quatrième et dernier des quatre PVM qui convertissent la lumière du soleil en électricité en orbite. Les principales fonctions du module d’alimentation sont de collecter, convertir, stocker et distribuer l’énergie électrique aux charges dans le segment et aux autres segments de la station. L’énergie électrique est une ressource essentielle pour la station car elle permet aux astronautes de vivre confortablement, de faire fonctionner la station en toute sécurité et d’effectuer des expériences scientifiques complexes. Étant donné que la seule source d’énergie facilement disponible pour les engins spatiaux est la lumière du soleil, des technologies ont été développées pour convertir efficacement l’énergie solaire en énergie électrique.
Les PVM utilisent un grand nombre de cellules solaires assemblées sur des panneaux solaires pour produire des niveaux de puissance élevés. Nasaet Lockheed Martin a développé une méthode de montage des panneaux solaires sur une « couverture » qui peut être pliée comme un accordéon pour être livrée dans l’espace, puis déployée à sa taille maximale une fois en orbite. Les cellules sont fabriquées à partir de lingots de cristal de silicium purifié qui convertissent directement la lumière en électricité pour une utilisation immédiate grâce à un processus appelé photovoltaïque.
Les cardans sont utilisés pour faire pivoter les réseaux afin qu’ils fassent face au soleil pour fournir une puissance maximale à la station spatiale. Après le processus de conversion, les PVM utilisent également l’électricité pour recharger les batteries embarquées pour des sources d’électricité continues pendant que la station est dans l’ombre de la Terre. Une fois terminé, le système d’alimentation de la station, composé de matériel américain et russe et de quatre modules photovoltaïques, utilisera entre 80 et 100 kilowatts d’énergie, soit environ jusqu’à 42 maisons moyennes (définies comme 2 800 pieds carrés (260,1 mètres carrés) de surface au sol utilisant 2 kilowatts chacun). Une partie de l’électricité est nécessaire pour faire fonctionner les systèmes de la station spatiale, mais une fois que cela est compris, l’ajout du S6doublera presque la quantité d’énergie disponible pour effectuer des expériences scientifiques sur la station – de 15 kilowatts à 30 kilowatts.
Il y a deux SAW sur le module S6 , chacune déployée dans la direction opposée de l’autre. Chaque SAW est composé de deux couvertures solaires montées sur un mât commun. Avant le déploiement, chaque panneau est plié en accordéon dans un Solar Array Blanket Box (SABB) mesurant 20 pouces (50,8 centimètres) de haut et 15 pieds (4,6 mètres) de long. Chaque couverture ne mesure qu’environ 20 pouces (50,8 centimètres) d’épaisseur lorsqu’elle est dans cette position de stockage. Le mât se compose de lattes emboîtables qui sont rangées pour le lancement à l’intérieur d’un ensemble de cartouche de mât (MCA).
Lorsqu’il est déployé par les astronautes, le SAW se déplie comme un ensemble monteur. Comme un torse humain, il a deux bras lorsqu’il est monté sur S6 , et ils sont tournés vers l’extérieur par les astronautes lors d’une sortie dans l’espace afin qu’ils puissent être entièrement déployés. Parce que ces couvertures ont été stockées pendant une si longue période, des tests approfondis ont été effectués pour s’assurer qu’elles se dérouleraient correctement en orbite afin que les couvertures ne collent pas ensemble. Lorsqu’elle est entièrement déployée, la SAW s’étend sur 115 pieds (35,1 mètres) et s’étend sur 38 pieds (11,6 mètres) et s’étend de chaque côté de l’ensemble d’équipement intégré. Étant donné que la deuxième SAW est déployée dans la direction opposée, l’envergure totale des ailes est supérieure à 240 pieds (73,2 mètres).
Chaque SAW pèse plus de 2 400 livres (1 089 kg) et utilise 32 800 cellules solaires, chacune mesurant 8 centimètres carrés avec 4 100 diodes. Les cellules individuelles ont été fabriquées par Spectrolab de Boeing et Aviation Systems Engineering Co. Il y a 400 cellules solaires par chaîne et il y a 82 chaînes par aile. Chaque SAW est capable de générer 32,8 kilowatts, soit environ 10,5 à 15 kilowatts de puissance utilisable. Il y a deux SAW sur le module S6 capables de fournir une puissance utile combinée de 21 à 30 kilowatts par PVM avec un total de quatre PVM sur la station.
Les panneaux solaires produisent plus d’énergie que ce qui peut être mis à la disposition des systèmes et des expériences de la station. Étant donné que tout ou partie des panneaux solaires sont parfois éclipsés par la Terre ou la structure de la station, des batteries sont utilisées pour stocker l’électricité à utiliser pendant ces périodes. Environ 60 % de l’électricité produite est utilisée pour recharger les batteries. Pendant les longues périodes d’éclipse, la disponibilité de l’énergie est limitée à environ 10,5 kilowatts de chaque SAW, ou 30 kilowatts par PVM. Pendant les périodes d’éclipse plus courtes, plus de puissance est disponible pour les systèmes de station et les expériences. Les disjoncteurs régulent également le flux d’électricité pour éviter la surchauffe de l’ensemble de transfert de service (UTA) qui permet à l’énergie de circuler à travers le SARJ rotatif . 
Lorsque le treillis S6 est attaché au Entretoise courte S5 , elle sera positionnée à l’extérieur du SARJ tribord , qui est conçu pour tourner en continu pour maintenir les ailes des panneaux solaires S4 et S6 orientées vers le soleil lorsque la station orbite autour de la Terre. Situé entre S3 et S4 , le SARJ tribord est un joint tournant de 10,5 pieds (3,2 mètres) de diamètre qui pèse environ 2 500 livres (1 134 kg). Le SARJ peut tourner à 360 degrés en utilisant des ensembles de roulements et un système de servocommande pour tourner. 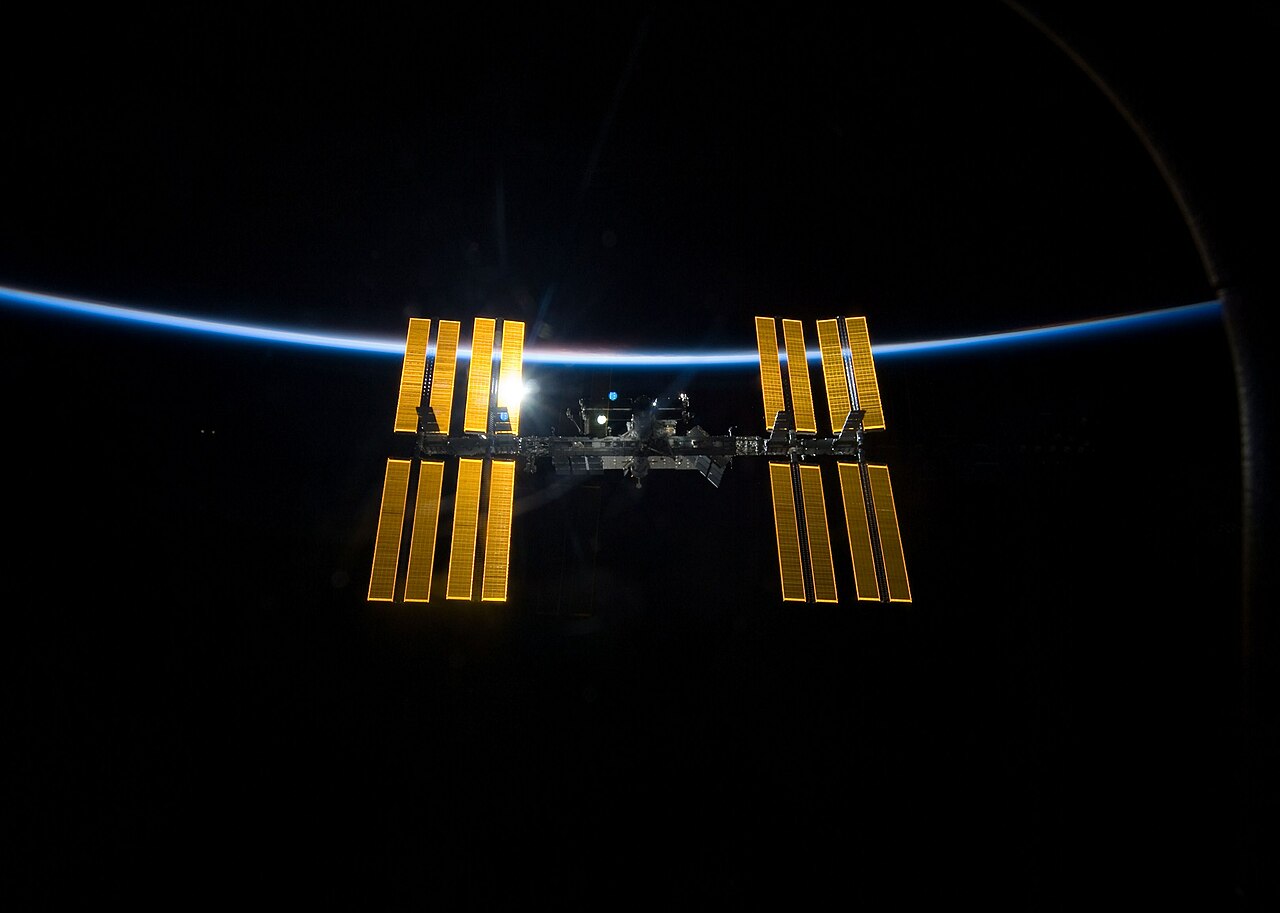 En raison des vibrations et des dommages constatés sur son anneau de course, le SARJ tribord n’a été tourné qu’en cas de besoin. STS-126les astronautes ont nettoyé et lubrifié l’anneau de course, et les résultats préliminaires montrent que l’articulation se déplace plus librement. L’anneau de course a une section triangulaire sur laquelle roulent 12 roulements. Toute la puissance passe par l’ensemble de transfert de service (UTA) dans le SARJ . Les ensembles d’anneaux de roulement permettent la transmission de données et de puissance à travers l’interface rotative afin qu’elle n’ait jamais à se dérouler.
En raison des vibrations et des dommages constatés sur son anneau de course, le SARJ tribord n’a été tourné qu’en cas de besoin. STS-126les astronautes ont nettoyé et lubrifié l’anneau de course, et les résultats préliminaires montrent que l’articulation se déplace plus librement. L’anneau de course a une section triangulaire sur laquelle roulent 12 roulements. Toute la puissance passe par l’ensemble de transfert de service (UTA) dans le SARJ . Les ensembles d’anneaux de roulement permettent la transmission de données et de puissance à travers l’interface rotative afin qu’elle n’ait jamais à se dérouler.
Les ailes du générateur solaire sont également orientées par le BGA, qui peut modifier le pas des ailes en faisant tourner le générateur solaire. Le BGA mesure 3 x 3 x 3 pieds (92 x 92 x 92 centimètres) et fournit un lien structurel à l’ensemble d’équipement intégré (IEA). Les fonctions les plus visuelles du BGA sont de déployer et de rétracter la SAW et de la faire pivoter autour de son axe longitudinal. Le BGA se compose de trois composants principaux : le module de roulement, de moteur et d’anneau de roulement (BMRRM), l’unité de commande électronique (ECU) et la structure de transition du cardan bêta, montés sur la plate-forme BGA. L’unité de shunt séquentiel (SSU) sert à gérer et à distribuer la puissance générée par les baies et est également montée sur chaque plate-forme BGA.
Tant la SARJet BGA sont des mécanismes de pointage et des dispositifs mécaniques utilisés pour pointer les réseaux vers le soleil. Ils peuvent suivre un angle cible et tourner vers cette cible dans la direction du soleil. Les contrôleurs en orbite mettent à jour en permanence ces cibles afin qu’elles continuent de se déplacer pendant que la station orbite autour de la Terre toutes les 90 minutes, en maintenant la même orientation vers le soleil à la même vitesse orbitale. Le mécanisme SARJ tourne sur 360 degrés à chaque orbite, soit environ 4 degrés par minute, alors que le BGA ne se déplace que d’environ quatre ou cinq degrés par jour. STS -119 a également réalisé plusieurs expériences, notamment la modification ionosphérique de la navette avec échappement local pulsé (SIMPLEX) , les expériences de turbulence ionique d’échappement de la navette (SEITE) etAnalyse Maui des injections dans la haute atmosphère (MAUI) . STS -119 a également été utilisé pour l’expérience « Boundary Layer Transition Detailed Test Objective ». Une tuile du système de protection thermique a été surélevée de 0,25 pouce (6,4 mm) au-dessus des autres de sorte que, à environ Mach 15 lors de la rentrée, une transition de couche limite serait initiée. Cette expérience a été répétée pendant STS-128 avec la tuile élevée à 0,35 pouces (8,9 mm), déclenchant à Mach 18 pour produire plus de chaleur.
STS -119 a également réalisé plusieurs expériences, notamment la modification ionosphérique de la navette avec échappement local pulsé (SIMPLEX) , les expériences de turbulence ionique d’échappement de la navette (SEITE) etAnalyse Maui des injections dans la haute atmosphère (MAUI) . STS -119 a également été utilisé pour l’expérience « Boundary Layer Transition Detailed Test Objective ». Une tuile du système de protection thermique a été surélevée de 0,25 pouce (6,4 mm) au-dessus des autres de sorte que, à environ Mach 15 lors de la rentrée, une transition de couche limite serait initiée. Cette expérience a été répétée pendant STS-128 avec la tuile élevée à 0,35 pouces (8,9 mm), déclenchant à Mach 18 pour produire plus de chaleur.
Une fois là-bas, Discovery a entamé son approche finale. Environ 2,5 heures avant l’accostage, les jets de la navette ont été tirés pendant ce qu’on appelle la brûlure d’initiation terminale. La navette a parcouru les derniers kilomètres jusqu’à la station lors de l’orbite suivante.
Alors que Discovery se rapprochait de la station, son système radar de rendez-vous et son capteur de contrôle de trajectoire ont fourni à l’équipage des données sur la distance et le taux de rapprochement. Plusieurs petites brûlures de correction ont placé Discovery à environ 1 000 pieds (304,8 mètres) sous la station.
Le commandant Lee Archambault , avec l’aide du pilote Anthony Antonelli et d’autres membres d’équipage, a piloté manuellement la navette pour le reste de l’approche et de l’accostage.
Il a arrêté Discovery à environ 600 pieds (182,9 mètres) sous la station. Une fois qu’il a déterminé que l’éclairage était approprié, il a manœuvré Discovery à travers un backflip de neuf minutes appelé Rendezvous Pitch Maneuver ou R-bar Pitch Maneuver (RPM) . Cela a permis à l’équipage de la station de prendre jusqu’à 300 photos numériques du bouclier thermique de la navette. Les membres de l’équipage de la station Michael Fincke et Sandra Magnus ont utilisé des appareils photo numériques avec des objectifs de 400 mm et 800 mm pour photographier les surfaces supérieure et inférieure de Discovery à travers les fenêtres du Zvezda .Module de services. 





Lee Archambault puis a volé Discovery à travers un quart de cercle jusqu’à une position à environ 400 pieds (121,9 mètres) directement devant la station. À partir de ce moment, il a commencé l’approche finale de l’amarrage à l’ adaptateur d’accouplement pressurisé 2 à l’extrémité avant du nœud Harmony .
Les membres de l’équipage de la navette utilisaient des ordinateurs portables traitant les données de navigation, les systèmes de télémétrie laser et le mécanisme d’amarrage de Discovery. À l’aide d’une caméra vidéo montée au centre du système d’amarrage Orbiter, Lee Archambault aligné les ports d’amarrage des deux vaisseaux spatiaux. Il s’est arrêté à 30 pieds (9,14 mètres) de la station pour s’assurer du bon alignement des mécanismes d’amarrage. Il a maintenu la vitesse de la navette par rapport à la station à environ un dixième de pied par seconde (3 centimètres par seconde), tandis que Discovery et la station se déplaçaient à environ 17 500 mph (28 163 km / h). Il a maintenu les mécanismes d’amarrage alignés avec une tolérance de trois pouces (7,6 centimètres).
Lorsque Discovery a pris contact avec la station le 17 mars 2009, des verrous préliminaires ont automatiquement attaché les deux engins spatiaux. Les jets de direction de la navette ont été désactivés pour réduire les forces agissant à l’interface d’accostage. Les ressorts amortisseurs du mécanisme d’amarrage amortissaient tout mouvement relatif entre la navette et la station.
Une fois le mouvement entre la navette et la station arrêté, l’anneau d’amarrage a été rétracté pour fermer un dernier ensemble de verrous entre les deux véhicules.
Quelques heures après l’ouverture des écoutilles, Sandra Magnus et Koichi Wakataéchangé des doublures de siège de vaisseau spatial russe Soyouz sur mesure . Avec cet échange, Koichi Wakata est devenu membre de l’équipage de la station spatiale Expedition 18 et Sandra Magnus est devenue membre de l’équipage de Discovery.
La première EVA de Steven Swanson et Richard Arnold a eu lieu le 19 mars 2009 (6h 07m). Après la sortie du Canadarm2 S6 et se sont éloignés, les marcheurs de l’espace ont branché des câbles d’alimentation et de données pour connecter le nouveau matériel. Les deux marcheurs de l’espace ont également retiré les verrous de lancement, rangé une goupille de quille, retiré et largué quatre couvertures thermiques et déployé les boîtes de couverture qui maintiennent les panneaux solaires en place pendant le lancement.
La première sortie dans l’espace de la mission a été consacrée à l’installation du nouveau segment en treillis de la station et à la préparation des panneaux solaires du segment pour le déploiement le huitième jour de la mission. Steven Swanson et Richard Arnold se sont déplacés vers le segment S5 – ou Starboard 5 – de la ferme et se sont assurés que le bras robotique de la station avait le nouveau S6segment de ferme dans la bonne position pour son installation. Il devrait être à environ 150 centimètres (4,9 pieds) de l’extrémité de la ferme S5 .
Depuis le poste de travail du bras robotique à l’intérieur du laboratoire Destiny , John Phillips a ensuite déplacé le segment à un point situé à 30 centimètres (11,8 pouces) de l’extrémité de la ferme S5 , tandis que Steven Swanson et Richard Arnold surveillaient les dégagements pour assurer un alignement correct. Sur leur « go », John Phillips a déplacé le segment à 15 centimètres (environ 6 pouces) pour une autre vérification avant de prendre contact.
En supposant que tout est correctement aligné, Richard Arnold engagé un verrou de capture pour permettre à la ferme de la station de supporter le nouveau segment, plutôt que le bras robotique. Ensuite, Steven Swanson a resserré les quatre boulons qui fixaient le segment à la station, et Richard Arnold a attaché quatre sangles de mise à la terre S6 à S5 .Avec S6 connecté en toute sécurité à S5 , Steven Swanson et Richard Arnold ont commencé à connecter les quatre connexions qui permettront à l’alimentation et aux données de passer d’un segment à l’autre. Après cela, Steven Swanson et Richard Arnold se sont séparés. Richard Arnold a libéré les dispositifs de retenue retenant la boîte de couverture qui contenait les couvertures de panneaux solaires, afin que les panneaux puissent être dépliés plus tard.
Steven Swanson , quant à lui, avait deux missions. Tout d’abord, il a préparé les panneaux de radiateur S6 à déplier. Il a retiré les six sangles qui maintiennent les panneaux pliés ensemble et a retiré deux épingles qui les empêchent de se déplier. Par la suite, les contrôleurs de vol du centre de contrôle de mission de Houston ont pu ordonner au radiateur de se déployer.
Steven Swanson est ensuite passé à l’assemblage du cardan bêta – ou BGA – qui permet aux ailes des panneaux solaires de se tordre lorsqu’elles suivent le soleil. Le BGA est empêché de tourner pendant le lancement par une attache de quille. Steven Swanson a retiré la fixation afin qu’il puisse faire pivoter le BGA en place pour le déploiement sur les ailes du panneau solaire. Après cela, il a réinstallé la fixation et retiré certaines contraintes de lancement sur le BGA.
Steven Swanson et Richard Arnold ont ensuite été réunis et ont fait pivoter les boîtes de couverture en position pour le déploiement des tableaux qu’elles contenaient. Steven Swanson a travaillé sur les deux boîtes du bas, tandis que Richard Arnold a travaillé sur les deux du haut.
Leurs dernières tâches consistaient à retirer les couvertures thermiques des unités de contrôle électronique et de contrôle séquentiel du système et à les jeter derrière la station pour qu’elles brûlent dans l’atmosphère terrestre.
 EVA a été effectuée de Steven Swanson et Joseph Acaba le 21 mars 2009 (6h 30m). La première tâche de cette sortie dans l’espace était de préparer un chantier pour les nouvelles batteries qui seront montées sur la mission STS-127 . Ils ont desserré des boulons, installé des repose-pieds. Steven Swanson a installé une antenne Global Positioning System sur le module logistique pressurisé attaché au Kibolaboratoire. Ils ont photographié des zones de panneaux de radiateur étendus à partir des fermes Port 1 et Tribord 1 et des connecteurs reconfigurés sur un panneau de brassage sur la ferme Zenith 1 qui alimente les gyroscopes à moment de contrôle. Après avoir lutté avec une goupille qui empêchait un système de fixation de transporteur de fret non pressurisé (UCCAS) de se déployer complètement, ils ont attaché l’UCCAS en place en toute sécurité.
EVA a été effectuée de Steven Swanson et Joseph Acaba le 21 mars 2009 (6h 30m). La première tâche de cette sortie dans l’espace était de préparer un chantier pour les nouvelles batteries qui seront montées sur la mission STS-127 . Ils ont desserré des boulons, installé des repose-pieds. Steven Swanson a installé une antenne Global Positioning System sur le module logistique pressurisé attaché au Kibolaboratoire. Ils ont photographié des zones de panneaux de radiateur étendus à partir des fermes Port 1 et Tribord 1 et des connecteurs reconfigurés sur un panneau de brassage sur la ferme Zenith 1 qui alimente les gyroscopes à moment de contrôle. Après avoir lutté avec une goupille qui empêchait un système de fixation de transporteur de fret non pressurisé (UCCAS) de se déployer complètement, ils ont attaché l’UCCAS en place en toute sécurité.
La première tâche de Steven Swanson et Joseph Acaba lors de cette sortie dans l’espace a été de desserrer deux boulons sur la batterie des baies P6 – ou Port 6. La batterie a été remplacée lors de la mission STS-127 .
Suite à cette tâche, Steven Swanson a travaillé sur la réparation d’une couverture thermique sur une déconnexion rapide sur le module de vanne de faisceau de radiateur du premier segment de port. Joseph Acaba, quant à lui, a travaillé entre les premier et troisième segments de port pour installer deux cavaliers fluides, en les déconnectant des panneaux auxquels ils sont actuellement connectés et en les reconnectant sur de nouveaux panneaux. Les deux marcheurs de l’espace ont ensuite été réunis au niveau du coupleur rotatif du tuyau flexible sur P1 pour libérer les pinces maintenant les tuyaux vers le bas. Cela prépare le coupleur, qui transfère l’ammoniac liquide à travers les joints qui permettent aux radiateurs de la station de tourner, pour être remplacé à une date ultérieure.
Une fois ce travail terminé, Steven Swanson et Joseph Acaba se sont déplacés vers le côté tribord de la ferme de la station pour préparer un système de fixation de charge utile à utiliser sur le dessus du côté extérieur du S3 .segment, dans un processus similaire à la préparation du système de fixation du transporteur de fret non pressurisé en vue de son utilisation. Les deux systèmes ont été utilisés pour fixer l’équipement à la ferme de la station.
Les tâches finales de la sortie dans l’espace étaient pour Steven Swanson de déplacer un support d’outil du segment de ferme zénithal de la station vers un chantier à l’extérieur du laboratoire Destiny , et pour Joseph Acaba de récupérer un repose-pied sur la ferme zénithale et de l’amener dans le sas de la gare.


Le jour de vol 8 a été principalement utilisé pour une journée libre, bien que les travaux sur l’assemblage du processeur d’urine se soient poursuivis et qu’ils aient dû éviter un morceau de débris orbital (provenant d’un ancien satellite chinois).
La troisième et dernière EVAde Richard Arnold et Joseph Acaba a été réalisée le 23 mars 2009 (6h 27m) pour déplacer l’un des deux chariots Crew and Equipment and Translation Aid – ou CETA – de la station. Les chariots ont été déplacés vers le côté bâbord de la poutre de la station lors de la mission précédente pour donner au transporteur mobile du bras robotique le meilleur accès possible à la poutre tribord pour l’installation du nouveau segment de poutre et des panneaux solaires. Une fois ce travail terminé, l’un des chariots a été ramené du côté bâbord de la station, laissant un chariot à utiliser de chaque côté de la ferme. Le chariot CETA a également reçu un nouveau coupleur. L’ EVAcomprenait également la lubrification des collets de capture de l’effecteur terminal sur le bras du robot de la station – similaire à ce qui a été fait à l’autre extrémité lors d’une sortie dans l’espace STS-126 à la fin de 2008. Il a été prouvé que cela empêchait le collet de s’accrocher ou de ne pas revenir parfaitement dans sa rainure à l’intérieur du mécanisme de verrouillage.
Richard Arnold a préparé le chariot pour être déplacé de P1 à S1 en relâchant ses freins et ses bogies à roues. Joseph Acaba l’a transporté jusqu’à sa nouvelle maison sur S1 à bord du bras robotique de la station. Joseph Acaba s’est ensuite déplacé sur le site et était prêt à aider Richard Arnold à réinstaller le chariot.
Richard Arnoldpuis a pris son tour sur le bras robotique de la station, qui l’a manoeuvré en place pour travailler sur le manipulateur adroit à usage spécial de la station – également connu sous le nom de Dextre – à l’extérieur du laboratoire Destiny . 
Quand il en eut fini avec cela, il descendit du bras robotique pour lubrifier les collets de verrouillage sur son effecteur terminal, le mécanisme qui permet au bras de s’accrocher aux appareils ou à l’équipement de grappin. Lors de la mission précédente de la navette, la même lubrification a été effectuée à l’autre extrémité du bras robotique – le bras a deux effecteurs terminaux, ce qui lui permet de se déplacer bout à bout sur différents chantiers de la station. Les collets ont connu des points collants qui ont provoqué des plis, et lors de la mission précédente, la lubrification a pu aider à résoudre ce problème. Richard Arnold a utilisé un pistolet à graisse pour appliquer la lubrification et une pince à bec effilé pour manœuvrer les collets.
Pendant que Richard Arnold travaillait sur Dextreet le bras robotique, Joseph Acaba a effectué plusieurs tâches sur la poutre tribord, reflétant une partie du travail que lui et Richard Arnold ont effectué sur le côté bâbord de la poutre lors de la deuxième sortie dans l’espace. Il a installé des cavaliers de fluide entre les segments de ferme S1 et S3 et a desserré les pinces sur le coupleur rotatif du tuyau flexible S1 . Il a également échangé un connecteur de contrôleur de bus à boulon sur le système de fixation segment à segment de la ferme.
Richard Arnold et Joseph Acaba ont terminé la sortie dans l’espace en remplaçant les modules de commande d’alimentation à distance défaillants sur les segments de treillis S0 et P1 .
Ils n’ont pas pu déployer le système de fixation du transporteur de fret non pressurisé du port 3 (UCCAS). Ils ont sécurisé l’UCCAS en place jusqu’à ce que les ingénieurs puissent évaluer le problème. Mission Control a annulé l’installation d’un système de fixation de charge utile similaire sur le côté tribord.
STS -119 a également été utilisé pour l’expérience « Boundary Layer Transition Detailed Test Objective ». Une tuile du système de protection thermique a été surélevée de 0,25 pouce (6,4 mm) au-dessus des autres de sorte que, à environ Mach 15 lors de la rentrée, une transition de couche limite serait initiée. Cette expérience a été répétée pendant STS-128 avec la tuile élevée à 0,35 pouces (8,9 mm), déclenchant à Mach 18 pour produire plus de chaleur.
Le 11e jour du vol, ils ont eu une conférence de presse avec le président Obama, des étudiants et des membres du Congrès. Ils ont également géré les transferts finaux de Discovery vers l’ ISS .
Au moment du désamarrage, les crochets et les loquets ont été ouverts et des ressorts ont poussé la navette loin de la station. Les jets de direction de Discovery ont été coupés pour éviter tout tir par inadvertance lors de la séparation initiale.
Une fois que Discovery était à environ deux pieds (61 centimètres) de la station et que les dispositifs d’amarrage étaient dégagés les uns des autres, Anthony Antonelli a rallumé les jets de direction et a contrôlé manuellement Discovery dans un couloir étroit alors que la navette se séparait de la station.
Discovery s’est déplacé à une distance d’environ 450 pieds (137,2 mètres), où AnthonyAntonelli a commencé à voler autour de la gare.
Une fois que Discovery a terminé 1,5 tour du complexe, Anthony Antonelli a tiré les jets de Discovery pour quitter la zone. La navette s’est déplacée à environ 46 miles (74 km) de la station et y est restée pendant que les équipes au sol analysaient les données de l’inspection tardive du bouclier thermique de la navette. La distance était suffisamment proche pour permettre à la navette de retourner à la station dans le cas peu probable où le bouclier thermique serait endommagé, empêchant la rentrée en toute sécurité de la navette.
En raison du mauvais temps à Cap Canaveral ( KSC ), l’atterrissage a été retardé d’une orbite.

https://www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts119/launch/index.html
https://www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts119/main/index.html
https://www.space.com/379-sts-119-mission-updates-part-1.html