 STS-127 Endeavour (23) 127 e mission de la navette spatiale
STS-127 Endeavour (23) 127 e mission de la navette spatiale

 Arrimage de la navette Endeavour
Arrimage de la navette Endeavour Achèvement de Kibo : STS-127 marque une nouvelle ère pour la science
Achèvement de Kibo : STS-127 marque une nouvelle ère pour la science Pour l’équipage multinational de sept astronautes à bord de la navette spatiale Endeavour, la mission STS-127 vers la Station spatiale internationale a été un succès retentissant. D’une durée de près de 16 jours, le vol a été l’un des plus longs du programme de la navette spatiale de la NASA. Les principaux objectifs de l’équipe – achever l’assemblage du complexe de laboratoires Kibo au Japon et fournir des pièces de rechange pour une utilisation future – ont nécessité cinq sorties dans l’espace et des travaux de robotique complexes de la part des équipages de la navette et de la station.
Pour l’équipage multinational de sept astronautes à bord de la navette spatiale Endeavour, la mission STS-127 vers la Station spatiale internationale a été un succès retentissant. D’une durée de près de 16 jours, le vol a été l’un des plus longs du programme de la navette spatiale de la NASA. Les principaux objectifs de l’équipe – achever l’assemblage du complexe de laboratoires Kibo au Japon et fournir des pièces de rechange pour une utilisation future – ont nécessité cinq sorties dans l’espace et des travaux de robotique complexes de la part des équipages de la navette et de la station. Aujourd’hui, à bord de la navette spatiale Endeavour, les membres d’équipage du STS-127 ont effectué l’inspection du système de protection thermique (TPS) de l’orbiteur à l’aide du système de télémanipulation de la navette (SRMS) et du système de capteur de flèche de l’orbiteur (OBSS).
Aujourd’hui, à bord de la navette spatiale Endeavour, les membres d’équipage du STS-127 ont effectué l’inspection du système de protection thermique (TPS) de l’orbiteur à l’aide du système de télémanipulation de la navette (SRMS) et du système de capteur de flèche de l’orbiteur (OBSS).
Ils ont également vérifié les combinaisons spatiales qui seront utilisées lors des cinq sorties dans l’espace prévues pendant la phase amarrée de la mission.
Les activités FD2 comprennent également les préparations de rendez-vous/d’amarrage pour l’amarrage avec l’ISS sur FD3, impliquant l’installation d’une caméra centrale, la vérification du système d’amarrage de l’orbiteur (ODS), l’extension de l’anneau ODS, la vérification des outils de rendez-vous et la manœuvre d’ajustement de l’orbite vers l’ISS. Pendant ce temps, l’équipe d’ingénieurs a poursuivi les évaluations sur les événements de débris observés lors de l’ascension de l’Endeavour. La NASA poursuivra l’analyse basée sur les données acquises lors de l’inspection OBSS et de la manœuvre de tangage R-Bar (RPM) pour dégager l’orbiteur pour la rentrée. L’inspection ciblée du TPS, si nécessaire, doit être effectuée sur FD5.
Pendant ce temps, l’équipe d’ingénieurs a poursuivi les évaluations sur les événements de débris observés lors de l’ascension de l’Endeavour. La NASA poursuivra l’analyse basée sur les données acquises lors de l’inspection OBSS et de la manœuvre de tangage R-Bar (RPM) pour dégager l’orbiteur pour la rentrée. L’inspection ciblée du TPS, si nécessaire, doit être effectuée sur FD5.
Les activités pour FD3 comprennent :
- Manoeuvre d’ajustement d’orbite vers l’ISS
- Inspection TPS depuis l’ISS (manœuvre R-Bar Pitch (RPM))
- Amarrage à l’ISS, ouverture de l’écoutille, entrée dans l’ISS et accueil avec l’équipage de l’ISS
- Échange d’affiliations d’équipage d’un membre d’équipage de l’Expédition 20 de l’ISS (échange de doublure de siège Soyouz)
- Préparation pour l’EVA #1
 STS-127 Endeavour (23) 127 e mission de la navette spatiale
STS-127 Endeavour (23) 127 e mission de la navette spatiale
Décollage de Cap Canaveral ( KSC ) et atterrissage à Cap Canaveral ( KSC ), piste 15. À l’origine, le lancement était prévu pour le 13 juin 2009. La NASA a annulé la tentative de lancement de l’Endeavour en raison d’une fuite dans le système d’évacuation de l’hydrogène gazeux. Le même problème a forcé à annuler une deuxième tentative de lancement le 17 juin 2009. En raison de conflits avec le lancement du LRO et d’une contrainte d’angle bêta, la prochaine opportunité de lancement disponible était prévue pour le 11 juillet 2009. Un tanking réussi un test de vérification des fuites a été effectué le 1er juillet 2009, avec des joints GUCP modifiés permettant aux préparatifs de lancement de se dérouler comme prévu. En raison de la foudre près de la rampe de lancement dans la soirée du 10 juillet 2009, la NASAa nettoyé le lancement pour la troisième fois et a été reporté au 12 juillet 2009. En raison d’une violation des conditions météorologiques de retour au site de lancement (RTLS), la NASA a nettoyé le lancement pour la quatrième fois dans la soirée du 12 juillet 2009. Cinquième lancement de STS -127 La tentative, le 13 juillet 2009, a également été nettoyée en raison de nuages d’enclume et de foudre à moins de 10 milles marins (19 km) du site de lancement, ce qui a enfreint les règles de sécurité du lancement.
À l’origine, le lancement était prévu pour le 13 juin 2009. La NASA a annulé la tentative de lancement de l’Endeavour en raison d’une fuite dans le système d’évacuation de l’hydrogène gazeux. Le même problème a forcé à annuler une deuxième tentative de lancement le 17 juin 2009. En raison de conflits avec le lancement du LRO et d’une contrainte d’angle bêta, la prochaine opportunité de lancement disponible était prévue pour le 11 juillet 2009. Un tanking réussi un test de vérification des fuites a été effectué le 1er juillet 2009, avec des joints GUCP modifiés permettant aux préparatifs de lancement de se dérouler comme prévu. En raison de la foudre près de la rampe de lancement dans la soirée du 10 juillet 2009, la NASAa nettoyé le lancement pour la troisième fois et a été reporté au 12 juillet 2009. En raison d’une violation des conditions météorologiques de retour au site de lancement (RTLS), la NASA a nettoyé le lancement pour la quatrième fois dans la soirée du 12 juillet 2009. Cinquième lancement de STS -127 La tentative, le 13 juillet 2009, a également été nettoyée en raison de nuages d’enclume et de foudre à moins de 10 milles marins (19 km) du site de lancement, ce qui a enfreint les règles de sécurité du lancement.
Avec un mois de retard à cause de fuites d’hydrogène et d’un temps orageux, la navette Endeavour a finalement décollé pour son sixième essai. L’objectif principal de STS -127 ( ISS -2J/A JEM EF , JEM ELM-ES) était de livrer et d’installer la troisième et dernière pièce de l’installation exposée japonaise ( JEM EF ) à Kibo et du module logistique expérimental japonais de Kibo – section exposée ( JEM ELM-ES ). L’installation exposée (une sorte de « porche ») est une partie de Kibo qui permettra aux astronautes d’effectuer des expériences scientifiques exposées au vide de l’espace. La partie exposée est similaire au module logistique du laboratoire Kibo , mais n’est pas pressurisée. Une fois ses charges utiles transférées au JEM EF , le JEM ELM-ES sera renvoyé dans la baie de charge utile.
L’objectif principal de STS -127 ( ISS -2J/A JEM EF , JEM ELM-ES) était de livrer et d’installer la troisième et dernière pièce de l’installation exposée japonaise ( JEM EF ) à Kibo et du module logistique expérimental japonais de Kibo – section exposée ( JEM ELM-ES ). L’installation exposée (une sorte de « porche ») est une partie de Kibo qui permettra aux astronautes d’effectuer des expériences scientifiques exposées au vide de l’espace. La partie exposée est similaire au module logistique du laboratoire Kibo , mais n’est pas pressurisée. Une fois ses charges utiles transférées au JEM EF , le JEM ELM-ES sera renvoyé dans la baie de charge utile.
Aussi. à l’intérieur de la soute se trouvait un transporteur de fret intégré à déploiement léger vertical ( ICC -VLD), contenant une variété d’équipements et de composants de rechange pour la station. Le transporteur contenait six nouvelles batteries à installer sur la poutre P6 , qui a été installée lors de deux des sorties dans l’espace de la mission, ainsi qu’une antenne espace-sol de rechange et une unité d’entraînement linéaire de rechange et un module de pompe qui étaient stockés sur un stockage externe. plate-forme sur le treillis de la station lors d’une des sorties dans l’espace.
La navette a également livré un nouvel ingénieur de vol – Timothy Kopra – pour rejoindre l’ équipage de l’expédition 20 et renvoyer l’ingénieur de vol de l’expédition 20 KoichiWakata de l’Agence japonaise d’exploration aérospatiale vers la Terre. Les derniers composants de Kibo s’envoleront vers la station spatiale sur STS -127. La mission STS -127 (2J/A) a conclu l’ assemblage de Kibo , ouvrant la voie à l’étape d’utilisation complète de Kibo .
Les derniers composants de Kibo s’envoleront vers la station spatiale sur STS -127. La mission STS -127 (2J/A) a conclu l’ assemblage de Kibo , ouvrant la voie à l’étape d’utilisation complète de Kibo .
Lors de cette troisième et dernière mission d’assemblage désignée par Kibo , les composants finaux de Kibo , l’installation exposée ( JEM EF ) et le module de logistique expérimentale – section exposée ( JEM ELM-ES), a été livré à la Station spatiale internationale. L’installation de ces composants a conclu l’assemblage de l’installation complexe japonaise sur la station.
Le JEM EF est une plate-forme d’expérimentation polyvalente sur laquelle diverses expériences scientifiques peuvent être réalisées en utilisant l’environnement de microgravité et de vide de l’espace.
Le JEM ELM-ES est un transporteur logistique qui a été lancé et retourné lors de la mission STS -127. Lors de ce vol, le JEM ELM-ES a transporté trois charges utiles JEM EF jusqu’à la station.
Le JEM EF est devenu opérationnel lors de la mission STS -127. KiboLa capacité scientifique de a été doublée lorsque la plate-forme pour les activités expérimentales exposées à l’espace a été prête.
Le lendemain du lancement d’Endeavour a été consacré à l’inspection du bouclier thermique de la navette, à l’aide de l’ extension Orbiter Boom Sensor System, ou OBSS , de 50 pieds (15 mètres) sur le bras robotique de la navette. L’ OBSS a utilisé des appareils laser et des caméras pour cartographier les ailes et le nez de la navette. Des experts sur le terrain ont analysé les images obtenues lors de l’inspection. Rendezvous a commencé par un lancement chronométré avec précision qui place la navette spatiale sur une trajectoire pour chasser la Station spatiale internationale. Une série de tirs de moteurs au cours des deux jours suivants a amené Endeavour à un point situé à environ 50 000 pieds (15 240 mètres) derrière la station. Une fois sur place, Endeavour a entamé son approche finale. Environ 2,5 heures avant l’accostage, les jets de la navette ont été tirés pendant ce qu’on appelle la brûlure d’initiation terminale. La navette a parcouru les derniers kilomètres jusqu’à la station lors de l’orbite suivante.
Rendezvous a commencé par un lancement chronométré avec précision qui place la navette spatiale sur une trajectoire pour chasser la Station spatiale internationale. Une série de tirs de moteurs au cours des deux jours suivants a amené Endeavour à un point situé à environ 50 000 pieds (15 240 mètres) derrière la station. Une fois sur place, Endeavour a entamé son approche finale. Environ 2,5 heures avant l’accostage, les jets de la navette ont été tirés pendant ce qu’on appelle la brûlure d’initiation terminale. La navette a parcouru les derniers kilomètres jusqu’à la station lors de l’orbite suivante.
Alors qu’Endeavour se rapprochait de la station, son système radar de rendez-vous et son capteur de contrôle de trajectoire ont fourni à l’équipage des données sur la portée et le taux de rapprochement. Plusieurs petites brûlures de correction ont placé Endeavour à environ 1 000 pieds (304,8 mètres) sous la station. Commandant Mark Polansky, avec l’aide du pilote Douglas Hurley et d’autres membres d’équipage, a piloté manuellement la navette pour le reste de l’approche et de l’accostage.
Mark Polansky a arrêté Endeavour à environ 600 pieds sous la station. Une fois qu’il a déterminé qu’il y avait un bon éclairage, il a manœuvré Endeavour à travers un backflip de neuf minutes appelé Rendezvous Pitch Maneuver connu sous le nom de R-bar Pitch Maneuver (RPM) . Cela a permis à l’équipage de la station de prendre jusqu’à 300 photos numériques du bouclier thermique de la navette. Les membres de l’équipage de la station Michael Barratt et Gennadi Padalka ont utilisé des appareils photo numériques avec des objectifs de 400 mm et 800 mm pour photographier les surfaces supérieure et inférieure d’Endeavour à travers les fenêtres du ZvezdaModule de services. L’objectif de 400 mm offrait une résolution allant jusqu’à trois pouces (7,6 centimètres) et l’objectif de 800 mm jusqu’à une résolution d’un pouce (2,5 centimètres). Gennadi Padalka a utilisé le 400 mm et Michael Barratt a utilisé le 800. La photographie était l’une des nombreuses techniques utilisées pour inspecter le système de protection thermique de la navette pour d’éventuels dommages. Les zones d’intérêt particulier comprenaient les tuiles de protection thermique, le carbone-carbone renforcé du nez et des bords d’attaque des ailes, les portes du train d’atterrissage et l’anse d’élevon. Les photos ont été transmises via le système de communication en bande Ku de la station pour être analysées par des ingénieurs système et des responsables de mission.
Quand Endeavour a terminé son backflip, il était de retour là où il avait commencé, avec sa soute face à la station. Marquer Polansky a ensuite fait voler Endeavour à travers un quart de cercle jusqu’à une position à environ 400 pieds (121,9 mètres) directement devant la station. À partir de ce moment, il a commencé l’approche finale de l’amarrage à l’ adaptateur d’accouplement pressurisé 2 à l’extrémité avant du nœud Harmony . Les membres de l’équipage de la navette utilisaient des ordinateurs portables qui traitaient les données de navigation, les systèmes de télémétrie laser et le mécanisme d’amarrage d’Endeavour. À l’aide d’une caméra vidéo montée au centre du système d’amarrage Orbiter, Mark Polansky a aligné les ports d’amarrage des deux engins spatiaux.
Marc Polanski a mis Endeavour en pause à 30 pieds de la station pour assurer un bon alignement des mécanismes d’amarrage. Il a maintenu la vitesse de la navette par rapport à la station à environ un dixième de pied par seconde (3 centimètres par seconde), tandis qu’Endeavour et la station se déplaçaient à environ 17 500 mph (28 163 km / h). Mark Polansky a maintenu les mécanismes d’amarrage alignés avec une tolérance de trois pouces (7,6 centimètres).
Lorsque Endeavour a pris contact avec la station le 17 juillet 2009, des verrous préliminaires ont automatiquement attaché les deux engins spatiaux. Les jets de direction de la navette ont été désactivés pour réduire les forces agissant à l’interface d’accostage. Les ressorts amortisseurs du mécanisme d’amarrage amortissaient tout mouvement relatif entre la navette et la station.
Une fois le mouvement entre la navette et la station arrêté, l’anneau d’amarrage a été rétracté pour fermer un dernier ensemble de verrous entre les deux véhicules. Quelques heures après l’amarrage d’Endeavour le troisième jour du vol, Timothy Kopra et Koichi Wakata ont échangé des revêtements de siège de vaisseau spatial russe Soyouz sur mesure . Avec cet échange, Koichi Wakata est devenu membre de l’équipage d’Endeavour. Timothy Kopra , quant à lui, a rejoint l’ équipage de l’Expédition 20 – le premier équipage de la station spatiale avec un effectif complet de six astronautes. Le commandant, le cosmonaute russe Gennadi Padalka , et l’ingénieur de vol de la NASA MichaelBarratt a lancé à la station le Soyouz TMA-14 russe en mars 2009. La seconde moitié de l’équipage – l’astronaute de l’Agence spatiale européenne Frank De Winne , le cosmonaute russe Roman Romanenko et l’astronaute de l’Agence spatiale canadienne Robert Thirsk – a emmené le Soyouz TMA-15 à la station en mai 2009. Koichi Wakata est arrivé à bord de la navette spatiale Discovery lors de la mission STS-119 en mars 2009. En septembre 2009, Timothy Kopra est revenu sur Terre lors de la mission de navette STS-128 , et Nicole Stott a pris sa place.
Quelques heures après l’amarrage d’Endeavour le troisième jour du vol, Timothy Kopra et Koichi Wakata ont échangé des revêtements de siège de vaisseau spatial russe Soyouz sur mesure . Avec cet échange, Koichi Wakata est devenu membre de l’équipage d’Endeavour. Timothy Kopra , quant à lui, a rejoint l’ équipage de l’Expédition 20 – le premier équipage de la station spatiale avec un effectif complet de six astronautes. Le commandant, le cosmonaute russe Gennadi Padalka , et l’ingénieur de vol de la NASA MichaelBarratt a lancé à la station le Soyouz TMA-14 russe en mars 2009. La seconde moitié de l’équipage – l’astronaute de l’Agence spatiale européenne Frank De Winne , le cosmonaute russe Roman Romanenko et l’astronaute de l’Agence spatiale canadienne Robert Thirsk – a emmené le Soyouz TMA-15 à la station en mai 2009. Koichi Wakata est arrivé à bord de la navette spatiale Discovery lors de la mission STS-119 en mars 2009. En septembre 2009, Timothy Kopra est revenu sur Terre lors de la mission de navette STS-128 , et Nicole Stott a pris sa place.
 La première EVA de David Wolf et Timothy Kopra a eu lieu le 18 juillet 2009 (5h 32m) pour préparer les mécanismes de connexion pour Kiboet l’installation exposée, que le bras robotique de la station a installé plus tard dans la journée. Ils ont également lâché des boulons sur un réservoir d’ammoniac pour préparer la prochaine mission de la navette, STS-128 . Ensuite, les deux ont travaillé pour déployer le système de fixation du transporteur de fret non pressurisé (UCCAS) sur la poutre du port 3 qui était bloquée et ne pouvait pas être effectuée sur STS-119 . L’UCCAS sera utilisé à l’avenir pour stocker du matériel et des fournitures à l’extérieur de la station.
La première EVA de David Wolf et Timothy Kopra a eu lieu le 18 juillet 2009 (5h 32m) pour préparer les mécanismes de connexion pour Kiboet l’installation exposée, que le bras robotique de la station a installé plus tard dans la journée. Ils ont également lâché des boulons sur un réservoir d’ammoniac pour préparer la prochaine mission de la navette, STS-128 . Ensuite, les deux ont travaillé pour déployer le système de fixation du transporteur de fret non pressurisé (UCCAS) sur la poutre du port 3 qui était bloquée et ne pouvait pas être effectuée sur STS-119 . L’UCCAS sera utilisé à l’avenir pour stocker du matériel et des fournitures à l’extérieur de la station.
Bien que l’installation réelle de l’installation exposée de Kibo ait été réalisée de manière robotique, David Wolf et Timothy Kopra ont commencé la première sortie dans l’espace en préparant cette installation aux deux extrémités. DavidWolf s’est rendu au laboratoire pour enlever une partie de l’isolant recouvrant actuellement son mécanisme d’accostage auquel l’installation exposée était attachée. Pour ce faire, il desserra quatre attaches et largua l’isolant. Pendant qu’il était dans la zone, il a également caché deux languettes de mise à la terre sur le bras robotique japonais à l’écart de la caméra du bras – elles interfèrent actuellement avec la vue.
Au même moment, Timothy Kopra travaillait à l’intérieur de la soute de la navette à l’extrémité exposée de cette préparation. Il a commencé par enlever l’isolant de son mécanisme d’accostage où il se fixera au Kibo laboratoire, en desserrant quatre attaches et en stockant l’isolant. Il a ensuite déconnecté le câble d’alimentation qui maintient l’installation exposée en marche pendant qu’elle se trouve dans la soute.
Le bras robotique de la navette s’était déjà accroché à l’installation exposée avant le début de la sortie dans l’espace, et après le débranchement du câble d’alimentation, les marcheurs de l’espace avaient fait leur part dans les préparatifs de son installation. Ensuite, le bras robotique de la station s’est mis en place et le bras robotique de la navette a récupéré l’installation dans la soute de la navette et l’a remise au bras robotique de la station. Le bras de la station l’a ensuite transporté par avion au laboratoire Kibo pour y être installé.
Pendant ce temps, David Wolf et Timothy Koprapoursuivi leurs activités de sortie dans l’espace. Déjà dans la soute de la navette, Timothy Kopra est allé de l’avant et a déconnecté les câbles d’alimentation fournissant de l’électricité au transporteur de fret intégré auquel sont attachés les équipements de rechange de la station qu’Endeavour transporte.  Et il a retiré un couvercle de contamination sur l’une des expériences que le support d’expériences de l’installation exposée transporte – MAXI, ou Monitor of All-sky X-ray Image.
Et il a retiré un couvercle de contamination sur l’une des expériences que le support d’expériences de l’installation exposée transporte – MAXI, ou Monitor of All-sky X-ray Image.
Après cela, Timothy Kopra s’est déplacé vers le haut du nœud Harmony pour sécuriser une couverture sur son mécanisme d’accostage commun. Il s’est déplacé plus loin à l’arrière de la station pour ramasser des outils sur le segment de ferme zénithal de la station, puis sur le côté gauche de l’ Unité.nœud pour ouvrir un autre capot sur son mécanisme d’accostage commun.
David Wolf est passé du laboratoire de Kibo au port de la station, ou à gauche, de la ferme. Il s’est arrêté à la section la plus interne de la ferme pour desserrer quatre boulons sur la barre de grappin d’un ensemble de réservoir d’ammoniac pour accélérer une autre tâche lors de la deuxième sortie dans l’espace, puis a continué vers l’équipement de l’équipage du port et l’aide à la traduction, ou CETA , chariot . Là, il déplaçait et retenait un repose-pieds et des poignées de frein à l’écart pour les empêcher d’interférer avec le joint tournant solaire alpha en rotation.
Pour le reste de la sortie dans l’espace, David Wolf et Timothy Kopra ont travaillé ensemble pour mettre en place deux systèmes pour attacher la cargaison à la ferme de la station – un système de fixation de transporteur de fret non pressurisé, ou UCCAS, et un système de fixation de charge utile, ou PAS. Bien qu’ils aient des noms différents, les deux systèmes sont presque identiques.  Lors de la dernière mission de la navette vers la station spatiale, les marcheurs de l’espace ont rencontré des problèmes lorsqu’ils ont essayé de mettre en place l’UCCAS sur le port 3, ou P3 , segment de la ferme de la station. Une goupille de détente coincée l’empêchait de se déployer comme il était censé le faire. Ainsi, David Wolf et Timothy Kopra sont revenus pour un nouvel essai lors de leur sortie dans l’espace. Ils ont utilisé un outil de libération de détente spécialement conçu pour aider à éliminer le bourrage et leur permettre d’installer complètement l’UCCAS.
Lors de la dernière mission de la navette vers la station spatiale, les marcheurs de l’espace ont rencontré des problèmes lorsqu’ils ont essayé de mettre en place l’UCCAS sur le port 3, ou P3 , segment de la ferme de la station. Une goupille de détente coincée l’empêchait de se déployer comme il était censé le faire. Ainsi, David Wolf et Timothy Kopra sont revenus pour un nouvel essai lors de leur sortie dans l’espace. Ils ont utilisé un outil de libération de détente spécialement conçu pour aider à éliminer le bourrage et leur permettre d’installer complètement l’UCCAS.
Après avoir mis en place l’UCCAS, David Wolf et Timothy Kopra se sont déplacés du côté tribord du treillis pour mettre en place un PAS sur le segment de treillis S3 . Les marcheurs de l’espace ont d’abord retiré les supports et les goupilles maintenant le loquet en place, ont déplacé le loquet en position, puis ont réinstallé les supports et les goupilles.  Le 19 juillet 2009, un dysfonctionnement dans une nouvelle toilette du laboratoire Destiny a poussé l’équipage à utiliser celle du segment russe alors que des tentatives étaient faites pour identifier le défaut. Pendant ce temps, la navette a été autorisée à rentrer.
Le 19 juillet 2009, un dysfonctionnement dans une nouvelle toilette du laboratoire Destiny a poussé l’équipage à utiliser celle du segment russe alors que des tentatives étaient faites pour identifier le défaut. Pendant ce temps, la navette a été autorisée à rentrer.
La deuxième EVA a été réalisée par David Wolf et Thomas Marshburnle 20 juillet 2009 (6h 53m) pour l’acheminement de pièces détachées d’un cargo vers une plate-forme d’arrimage sur le treillis de la gare. Ces pièces comprennent : une antenne, un module de pompe et un mécanisme de rail qui permet à un transporteur de se déplacer de haut en bas dans la ferme. Ils ont également déplacé un grappin sur un réservoir d’ammoniac pour préparer la mission STS-129 , prévue pour novembre 2009. Une installation prévue d’une caméra sur l’installation d’expérimentation japonaise a été reportée à une future EVA par manque de temps.
La deuxième sortie dans l’espace s’est concentrée principalement sur le transfert de l’équipement de rechange amené par la navette vers un emplacement de stockage sur le segment de ferme de la station.
Entre la première et la deuxième sortie dans l’espace, Mark Polansky et DouglasHurley a utilisé le bras robotique de la navette pour déballer le transporteur de fret intégré qui contenait tout l’équipement de rechange que la navette livrait à la station spatiale. Au jour 6 du vol, avant le début de la deuxième sortie dans l’espace, Julie Payette et Koichi Wakata ont pris le relais à l’aide du bras robotique de la station et ont manoeuvré le porteur à installer temporairement sur le treillis.
Cela devait être fait avant le début de la sortie dans l’espace, car la première tâche de David Wolf était de grimper dans un repose-pieds sur le bras robotique de la station afin qu’il puisse transférer l’équipement du transporteur vers une plate-forme de rangement externe.
Ensemble, David Wolf et Thomas Marshburndétaché d’abord l’antenne espace-sol de rechange du transporteur de fret. David Wolf l’a ensuite transporté via le bras robotique jusqu’à la plate-forme de rangement, où lui et Thomas Marshburn l’ont installé. Ils ont ensuite répété le processus avec le module de pompe de rechange et l’unité d’entraînement linéaire de rechange.
Ils ont passé le temps restant à l’extérieur à ajouter de l’équipement de vision sur l’installation exposée nouvellement installée, ce qui a aidé à l’installation du support d’expérience de l’installation exposée le jour suivant. Pour le lancement, il a été enfermé dans un endroit temporaire sur l’installation exposée, et David Wolf et Thomas Marshburnnécessaire pour desserrer six boulons, retirer une partie de l’isolant et débrancher un câble d’alimentation pour le récupérer. Pour l’installer à son emplacement permanent à l’extrémité avant de l’installation exposée, ils ont utilisé deux boulons pour le fixer, puis reconnecter son câble d’alimentation. La troisième EVA par David Wolf et Christopher Cassidy a été réalisée le 22 juillet 2009 (5h 59m) pour préparer l’installation exposée pour les transferts d’expériences et remplacer deux des six batteries (quatre étaient prévues) sur le treillis bâbord où elles sont logées pour alimenter la charpente. Cette EVA a été raccourcie par les responsables de la NASA lorsque l’astronaute Christopher CassidyLes niveaux de dioxyde de carbone de ont montré une tendance à la hausse en raison d’un problème avec le système d’élimination du CO 2 de sa combinaison spatiale . L’annulation de la sortie dans l’espace était simplement une précaution.
La troisième EVA par David Wolf et Christopher Cassidy a été réalisée le 22 juillet 2009 (5h 59m) pour préparer l’installation exposée pour les transferts d’expériences et remplacer deux des six batteries (quatre étaient prévues) sur le treillis bâbord où elles sont logées pour alimenter la charpente. Cette EVA a été raccourcie par les responsables de la NASA lorsque l’astronaute Christopher CassidyLes niveaux de dioxyde de carbone de ont montré une tendance à la hausse en raison d’un problème avec le système d’élimination du CO 2 de sa combinaison spatiale . L’annulation de la sortie dans l’espace était simplement une précaution.
David Wolf a déplacé une interface de chantier et une main courante de leur emplacement actuel sur le nœud Harmony vers un nouveau site sur le laboratoire de Columbus . Christopher Cassidy , quant à lui, a préparé les expériences et l’équipement amenés à l’intérieur du support d’expériences de l’installation exposée pour être transférés à l’installation exposée elle-même en enlevant l’isolation. Le transporteur aura été installé le jour du vol 7 par Mark Polansky et Julie Payette au bras robotique de la navette et DouglasHurley et Koichi Wakata à la gare.
Christopher Cassidy a commencé avec le système de communication interorbite, qui avait deux couvercles que Christopher Cassidy devait retirer et jeter et un à ramener à l’intérieur. Il a également dû libérer le mécanisme de maintien de l’antenne de l’équipement, ce qui a nécessité le retrait de deux boulons. Christopher Cassidy est ensuite passé à l’équipement d’acquisition de données de l’environnement spatial – charge utile attachée.
De là, les deux marcheurs de l’espace se sont déplacés vers l’extrémité du côté bâbord de la ferme de la station pour le travail de la batterie. Avant le début de la sortie dans l’espace, Douglas Hurley et Julie Payettea utilisé le bras robotique de la station pour manœuvrer le transporteur de fret intégré, auquel les nouvelles batteries du générateur solaire P6 étaient attachées, aussi près que possible du chantier de David Wolf et Christopher Cassidy – presque aussi loin que le bras peut atteindre.
David Wolf et Christopher Cassidy ont remplacé deux des six batteries lors de cette sortie dans l’espace. Les nouvelles batteries étaient désignées par les lettres A à F, et les anciennes batteries numérotées de un à six. Christophe Cassidya retiré une vieille batterie de l’ensemble électrique intégré du panneau solaire en installant deux « scoops » qui ont été utilisés par les astronautes pour manœuvrer les batteries, puis en retirant deux boulons. Il l’a ensuite remis, est sorti du repose-pieds dans lequel il travaillait, s’est rapproché de David Wolf et a saisi la batterie. David Wolf a relâché la batterie, s’est déplacé légèrement plus bas dans la ferme et s’est positionné pour saisir la batterie. 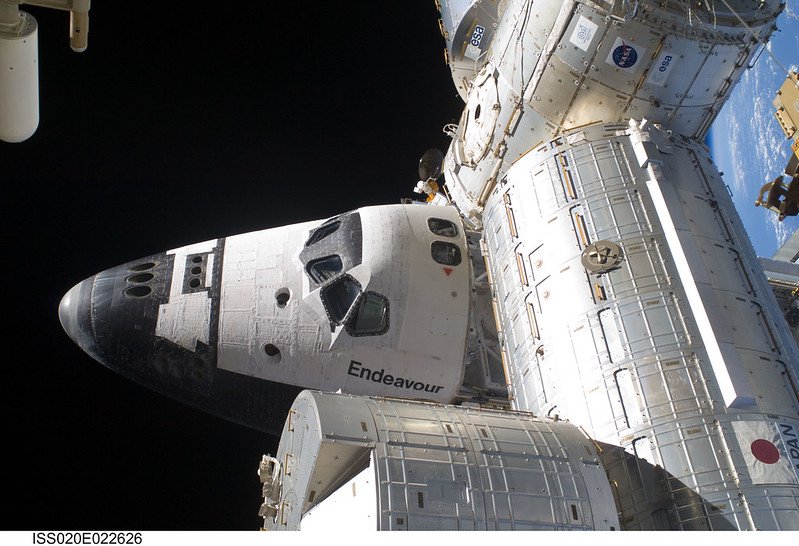 Christopher Cassidy a remis la batterie à David Wolf puis s’est rapproché pour saisir à nouveau et contrôler la batterie. Le processus s’appelait «berger» et pouvait apparaître comme «un vermifuge» de la batterie, sauf qu’une personne tient toujours une batterie de 367 livres (167 kg).
Christopher Cassidy a remis la batterie à David Wolf puis s’est rapproché pour saisir à nouveau et contrôler la batterie. Le processus s’appelait «berger» et pouvait apparaître comme «un vermifuge» de la batterie, sauf qu’une personne tient toujours une batterie de 367 livres (167 kg).
Pour installer la batterie dans un emplacement de stockage temporaire sur l’ensemble électrique intégré, David Wolf a utilisé l’une des pelles pour la fixer à une attache multi-usage, ou une pile de billes, et à des effecteurs terminaux. Les astronautes ont ensuite retiré la batterie A du transporteur de fret intégré et l’ont ramenée à l’ensemble électrique intégré pour l’installation dans l’emplacement 1. L’étape suivante consistait à retirer la batterie 4, à la diriger vers le transporteur de fret à installer dans l’emplacement A, et retirer batterie B à installer dans l’emplacement 4. 
Le processus s’est poursuivi jusqu’à ce que deux batteries soient installées, puis la première batterie a été retirée de son emplacement de stockage temporaire et installée à l’emplacement vacant du transporteur de fret.
La quatrième EVA a été réalisée par Thomas Marshburn et Christopher Cassidy le 24 juillet 2009 (7h 12m) pour remplacer les quatre dernières batteries sur la poutre bâbord.
Thomas Marshburn et Christopher Cassidy ont passé la première moitié de la quatrième sortie dans l’espace à terminer le travail d’échange de batterie que David Wolf et Christopher Cassidycommencé. Ils ont utilisé la même procédure. Les marcheurs de l’espace ont conclu leur travail en installant l’équipement de vision arrière de l’installation exposée, dans un processus similaire à celui effectué par Thomas Marshburn et David Wolf lors de la deuxième sortie dans l’espace. La cinquième et dernière EVA par Thomas Marshburn et Christopher Cassidy a eu lieu le 27 juillet 2009 (4h 54m) pour retirer les couvertures du Dextrebras robotisé, reconfigurez les câbles sur un panneau pour certains disjoncteurs et déployez deux systèmes de fixation de charge utile supplémentaires. Ils ont également installé une deuxième caméra qui fournira une vidéo d’expériences à l’extrémité arrière de l’installation exposée, un travail initialement prévu pour EVA 4. Enfin, ils ont remplacé un système de caméra vieillissant sur la poutre tribord. Au lieu de cela, certaines tâches d’avance ont été effectuées, notamment l’installation de mains courantes et d’un repose-pieds portable.
La cinquième et dernière EVA par Thomas Marshburn et Christopher Cassidy a eu lieu le 27 juillet 2009 (4h 54m) pour retirer les couvertures du Dextrebras robotisé, reconfigurez les câbles sur un panneau pour certains disjoncteurs et déployez deux systèmes de fixation de charge utile supplémentaires. Ils ont également installé une deuxième caméra qui fournira une vidéo d’expériences à l’extrémité arrière de l’installation exposée, un travail initialement prévu pour EVA 4. Enfin, ils ont remplacé un système de caméra vieillissant sur la poutre tribord. Au lieu de cela, certaines tâches d’avance ont été effectuées, notamment l’installation de mains courantes et d’un repose-pieds portable.
La dernière sortie dans l’espace de la mission a été consacrée principalement à des tâches d’avance qui n’ont pas pu être terminées lors de la dernière mission de la navette vers la station spatiale. Le premier travail de Thomas Marshburn l’a amené au manipulateur habile à usage spécial de la station – également connu sous le nom de Dextre– à l’extérieur du laboratoire Destiny . Il était en train de resécuriser deux couvercles thermiques sur les mécanismes de changement d’outil de l’unité de remplacement orbital de Dextre – en d’autres termes, l’une des articulations du poignet du robot.
Pendant ce temps, Christopher Cassidy a échangé deux connecteurs sur un panneau de brassage sur le segment de ferme zénithal de la station.
Les deux ont ensuite travaillé ensemble pour installer d’abord deux autres systèmes de fixation de charge utile – sur les côtés intérieur et extérieur de la partie nadir de la ferme S3 – en suivant la procédure que David Wolf et Timothy Koprautilisé lors de la première sortie dans l’espace, et installé un ensemble émetteur-récepteur externe de système vidéo sans fil, ou WETA, sur le même segment. Les WETA prennent en charge la transmission de la vidéo à partir des caméras de casque des marcheurs de l’espace. Pour ce faire, Thomas Marshburn a retiré une boîte factice actuellement à l’emplacement, puis a attaché le WETA à un poteau. Christopher Cassidy a connecté trois câbles à l’ensemble. Au moment du désamarrage, les crochets et les loquets ont été ouverts et des ressorts ont poussé la navette loin de la station. Les jets de direction d’Endeavour ont été coupés pour éviter tout tir par inadvertance lors de la séparation initiale.
Au moment du désamarrage, les crochets et les loquets ont été ouverts et des ressorts ont poussé la navette loin de la station. Les jets de direction d’Endeavour ont été coupés pour éviter tout tir par inadvertance lors de la séparation initiale.
Une fois qu’Endeavour était à environ deux pieds (61 centimètres) de la station et que les dispositifs d’amarrage étaient éloignés les uns des autres, Douglas Hurleya rallumé les jets de direction et contrôlé manuellement Endeavour dans un couloir étroit alors que la navette se séparait de la station.
Endeavour s’est déplacé à une distance d’environ 450 pieds (137,2 mètres), où Douglas Hurley a commencé à voler autour de la station. Une fois qu’Endeavour a terminé 1,5 révolution du complexe, Douglas Hurley a tiré les jets d’Endeavour pour quitter la zone. La navette s’est déplacée à environ 46 miles (74 km) de la station et y est restée pendant que les équipes au sol analysaient les données de l’inspection tardive du bouclier thermique de la navette. La distance était suffisamment proche pour permettre à la navette de retourner à la station dans le cas peu probable où le bouclier thermique serait endommagé, empêchant la rentrée en toute sécurité de la navette. Deux satellites étaient également transportés par l’orbiteur, pour un déploiement à la fin de la mission. Le satellite de navigation en orbite du double système de positionnement global autonome, appelé DRAGONSAT , a recueilli des données sur les capacités de rendez-vous et d’amarrage des engins spatiaux autonomes, et se compose de deux picosatellites, AggieSat2 et PARADIGM (BEVO-1), qui acquièrent des données GPS à partir d’un appareil à NASA et l’envoyer aux stations au sol de la Texas A&M University et de l’Université du Texas à Austin. Après la libération, les deux picosatellites sont restés attachés pendant deux orbites pour collecter des données GPS , et se sont séparés pendant la troisième orbite.
Deux satellites étaient également transportés par l’orbiteur, pour un déploiement à la fin de la mission. Le satellite de navigation en orbite du double système de positionnement global autonome, appelé DRAGONSAT , a recueilli des données sur les capacités de rendez-vous et d’amarrage des engins spatiaux autonomes, et se compose de deux picosatellites, AggieSat2 et PARADIGM (BEVO-1), qui acquièrent des données GPS à partir d’un appareil à NASA et l’envoyer aux stations au sol de la Texas A&M University et de l’Université du Texas à Austin. Après la libération, les deux picosatellites sont restés attachés pendant deux orbites pour collecter des données GPS , et se sont séparés pendant la troisième orbite.
Un second satellite, l’ Atmospheric Neutral Density Experiment (ANDE-2), fait partie d’un projet du département de la Défense des États-Unis piloté par le Naval Research Laboratory pour fournir des satellites de haute qualité, et mesurera la densité et la composition de l’atmosphère en orbite terrestre basse tout en étant suivi depuis le sol, pour mieux prédire le mouvement et désintégration des objets en orbite. ANDE-2 se compose de deux microsatellites sphériques, le vaisseau spatial ANDE Active (Castor) et le vaisseau spatial ANDE Passive (Pollux), et sera suivi par le réseau International Laser Ranging Service (ILRS) ainsi que par le Space Surveillance Network (SSN). des satellites, Pollux, exécute des bibliothèques Arduino, avec sa charge utile programmée et construite par des étudiants.
STS-127 – Effort
127e mission de la navette spatiale
23e vol d’effort
Équipage:
Mark Polansky, commandant
Doug Hurley, pilote
Christopher Cassidy, spécialiste de mission
Tom Marshburn, spécialiste de mission
Dave Wolf, spécialiste de mission
Julie Payette, spécialiste de missions
Tim Kopra, spécialiste de mission, embarquement pour la Station spatiale internationale
Kiochi Wakata, ingénieur de vol, de retour de la Station spatiale internationale Préparations de l’orbiteur :
Préparations de l’orbiteur :
Remorquage à l’installation de traitement Orbiter – 13 décembre 2008
Transfert au bâtiment d’assemblage des véhicules – 10 avril 2009
Déploiement sur la rampe de lancement 39B – 17 avril 2009 (en tant que véhicule de sauvetage)
Rollaround to Launch Pad 39A – 31 mai 2009 (pour le lancement)
Lancement : 15 juillet 2009 – 18 h 03 HAE. Le lancement était initialement prévu pour le 13 juin mais a été reporté en raison d’une fuite d’hydrogène au niveau de la plaque de support ombilical au sol. Le lancement a été reporté au 17 juin, mais la tentative de lancement a été annulée lorsqu’une fuite d’hydrogène similaire s’est produite. Le dépannage et les réparations ont entraîné le report du lancement au 11 juillet, mais la tentative de lancement a été reportée pour permettre d’évaluer les effets de la foudre près de la rampe de lancement. Le lancement a été reporté au 12 juillet, mais a été reporté en raison de conditions météorologiques inacceptables au Shuttle Landing Facility du Kennedy Space Center. Le lancement a été reporté au 13 juillet, mais a été reporté en raison du mauvais temps au Kennedy Space Center. Le lancement le 15 juillet s’est produit à l’heure sans retard.
Atterrissage : 31 juillet 2009 – 10 h 48 HAE à la piste 15, Kennedy Space Center. La durée de la mission était de 15 jours, 16 heures, 44 minutes, 58 secondes. Résumé des missions :
Résumé des missions :
L’objectif principal de la mission était de livrer le module logistique japonais (JLM) à la Station spatiale internationale (ISS). Il y a eu cinq sorties dans l’espace au cours de la mission. La première sortie dans l’espace a eu lieu le 18 juillet et a duré 5 heures et 32 minutes. Les astronautes Wolf et Kopra ont préparé l’extérieur du module KIBO pour recevoir le JLM. La deuxième sortie dans l’espace a eu lieu le 20 juillet et a duré 6 heures et 53 minutes. Les astronautes Wolf et Marshburn ont retiré une antenne, un module de pompe et une unité d’entraînement linéaire d’un transporteur de fret intégré et les ont attachés à une plate-forme de rangement sur l’ISS P3 Truss.
La troisième sortie dans l’espace a eu lieu le 22 juillet et a duré 5 heures et 59 minutes. Les astronautes Wolf et Cassidy ont retiré les couvertures isolantes du laboratoire KIBO et ont préparé le JLM pour l’installation. La sortie dans l’espace a pris fin tôt lorsque les niveaux de dioxyde de carbone ont augmenté à l’intérieur de la combinaison spatiale de l’astronaute Cassidy. La quatrième sortie dans l’espace a eu lieu le 24 juillet et a duré 7 heures et 12 minutes.  Les astronautes Cassidy et Marshburn ont installé quatre batteries sur l’ISS P6 Truss.
Les astronautes Cassidy et Marshburn ont installé quatre batteries sur l’ISS P6 Truss.
La cinquième sortie dans l’espace a eu lieu le 27 juillet et a duré 4 heures et 54 minutes. Les astronautes Cassidy et Marshburn ont installé des caméras vidéo sur le JLM et sécurisé une isolation multicouche autour du bras robotique du manipulateur agile à usage spécial (DEXTRE) de l’ISS. Après avoir quitté l’ISS, l’équipage a déployé deux paires de petits satellites conçus par des étudiants.
Suivez la mission STS-127 de la navette spatiale Endeavour pour terminer l’assemblage du segment japonais de la Station spatiale internationale. Rechargez cette page pour les dernières mises à jour.
Inscrivez-vous à notre fil Twitter et recevez des mises à jour par SMS sur votre téléphone portable. Les lecteurs américains peuvent également s’inscrire à partir de leur téléphone en envoyant un SMS « follow spaceflightnow » au 40404. (Des frais de messagerie texte standard s’appliquent.) La navette spatiale Endeavour prépare son retour sur Terre
La navette spatiale Endeavour prépare son retour sur Terre
La navette spatiale Endeavour s’est désamarrée de la Station spatiale internationale mardi pour prendre des photos de l’installation de recherche en orbite avant les dernières manœuvres pour préparer son retour à la maison. Endeavour s’est séparé de l’ISS à 13h26 (17h26 GMT), a indiqué la NASA.
Endeavour s’est séparé de l’ISS à 13h26 (17h26 GMT), a indiqué la NASA.
« Après avoir effectué un survol de la station spatiale, la navette Endeavour effectuera une manœuvre pour se séparer de la station », a-t-il ajouté.
Lundi, les astronautes Chris Cassidy et Tom Marshburn ont effectué la cinquième et dernière sortie dans l’espace de la mission Endeavour, installant des caméras sur le nouveau laboratoire japonais Kibo de l’ISS, ainsi que des mains courantes et un repose-pied portable pour aider les futurs marcheurs dans l’espace. La navette spatiale a décollé de Floride le 15 juillet et devrait atterrir sur Terre le 31 juillet avec son équipage de sept astronautes. Le lancement de la prochaine navette, Discovery, vers l’ISS est prévu le 18 août à 04h25 (08h25 GMT).
La navette spatiale a décollé de Floride le 15 juillet et devrait atterrir sur Terre le 31 juillet avec son équipage de sept astronautes. Le lancement de la prochaine navette, Discovery, vers l’ISS est prévu le 18 août à 04h25 (08h25 GMT).
https://www.nasa.gov/mission_pages/shuttle/shuttlemissions/sts127/launch/127_overview.html
https://phys.org/news/2009-07-space-shuttle-endeavour-readies-earth.html
https://iss.jaxa.jp/en/kibo/mission/2ja/2ja_news/fd2_end.html